Bring this project to life
Update Nov 3 2022: Part 2 on Textual Inversion is now online with updated demo Notebooks!
Dreambooth is an incredible new twist on the technology behind Latent Diffusion models, and by extension the massively popular pre-trained model, Stable Diffusion from Runway ML and CompVis.
This new method allows users to input a few images, a minimum of 3-5, of a subject (such as a specific dog, person, or building) and the corresponding class name (such as "dog", "human", "building") in order to fine-tune and personalize any text-to-image model that encodes a unique identifier that refers to the subject. When combined with the incredible versatility of Stable Diffusion, we can create incredible models featuring robust depictions of any object or style we choose.
In this tutorial, we will walk step-by-step through the setup, training, and inference of a Dreambooth Stable Diffusion model within a Gradient Notebook. We provide the demo code optimized for the Notebooks environment, so that users can take advantage of the wide variety of powerful GPUs on the platform.
To load this tutorial, simply click this link to Run on Gradient Notebooks.
Once in the webpage, select a project of your choice. This link is currently set up to run with the P5000, but can be changed for faster training. Training on the P5000 for 500 epochs takes around ~25 minutes.
Note: You will need at least 16 GB of GPU RAM to run this model training. The P5000, P6000, V100, V100-32G, RTX5000, A4000, A5000, A100, and A100-80G powered machines will all be able to run this training.
URL for Notebook
Change the url below where it says <YOUR-GPU-CHOICE> to any GPU offered by Paperspace.
https://console.paperspace.com/github/gradient-ai/dreambooth-stable-diffusion/blob/main/sd_dreambooth_gradient.ipynb?machine=<YOUR-GPU-CHOICE>
Now that we have opened the Notebook, start it up to begin the demo.
Note: this demo is based on the HuggingFace notebook found here
Step 1: Setup
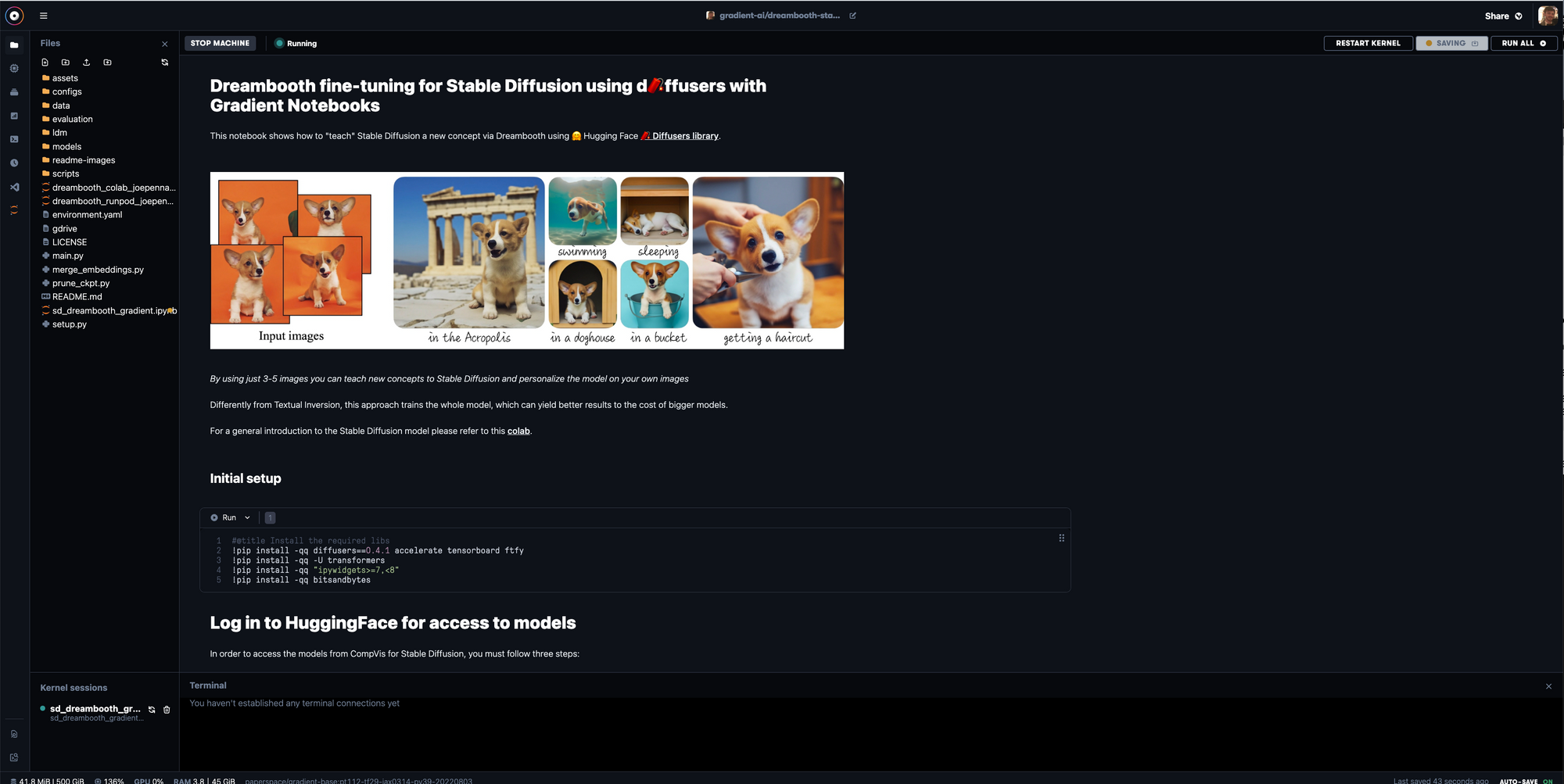
Once we have launched the Notebook, let's make sure we are using sd_dreambooth_gradient.ipynb, and then follow the instructions on the page to set up the Notebook environment.
Run the install cell at the top first to get the necessary packages.
#@title Install the required libs
!pip install -qq diffusers==0.4.1 accelerate tensorboard ftfy
!pip install -qq -U transformers
!pip install -qq "ipywidgets>=7,<8"
!pip install -qq bitsandbytesWe will then log into Huggingface with the next cell, so that we can access the model files. Be sure to get permissions for access using your HuggingFace account at this URL, and then paste the token found here in the code cell below where it says <your_huggingface_token>. Run the cell to login.
!wget https://raw.githubusercontent.com/gradient-ai/stable-diffusion/main/login.py
!python login.py --token <your_huggingface_token>Finally, we will complete setup by importing the relevant libraries, and creating an image_grid function to help display our image outputs in a grid dictated by the number of samples by the number of rows.
#@title Import required libraries
import argparse
import itertools
import math
import os
from contextlib import nullcontext
import random
import numpy as np
import torch
import torch.nn.functional as F
import torch.utils.checkpoint
from torch.utils.data import Dataset
import PIL
from accelerate import Accelerator
from accelerate.logging import get_logger
from accelerate.utils import set_seed
from diffusers import AutoencoderKL, DDPMScheduler, PNDMScheduler, StableDiffusionPipeline, UNet2DConditionModel
from diffusers.hub_utils import init_git_repo, push_to_hub
from diffusers.optimization import get_scheduler
from diffusers.pipelines.stable_diffusion import StableDiffusionSafetyChecker
from PIL import Image
from torchvision import transforms
from tqdm.auto import tqdm
from transformers import CLIPFeatureExtractor, CLIPTextModel, CLIPTokenizer
import bitsandbytes as bnb
# Helper function
def image_grid(imgs, rows, cols):
assert len(imgs) == rows*cols
w, h = imgs[0].size
grid = Image.new('RGB', size=(cols*w, rows*h))
grid_w, grid_h = grid.size
for i, img in enumerate(imgs):
grid.paste(img, box=(i%cols*w, i//cols*h))
return gridNow that setup is complete, we will begin setting up the data and concept variables that we will use for the fine-tuning later on.
Setting up our concept
There are two paths we can take now: follow the demo to the letter, or use our own images. If we want to use our own images, create the inputs directory and upload those images to it. Otherwise, run the cell below. It will create the inputs directory, and set a list of image URLs to download to the directory.
!mkdir inputs
#@markdown Add here the URLs to the images of the concept you are adding. 3-5 should be fine
urls = [
"https://huggingface.co/datasets/valhalla/images/resolve/main/2.jpeg",
"https://huggingface.co/datasets/valhalla/images/resolve/main/3.jpeg",
"https://huggingface.co/datasets/valhalla/images/resolve/main/5.jpeg",
"https://huggingface.co/datasets/valhalla/images/resolve/main/6.jpeg",
## You can add additional images here
]Now, we need to begin setting up the subject for our Dreambooth training by uploading or downloading images for our concept to the repo inputs.
You can also use the code in the cell above to alter the sample image URLs downloaded for this demo, if the data is stored publicly online.
# @title Setup and check the images you have just added
import requests
import glob
from io import BytesIO
def download_image(url):
try:
response = requests.get(url)
except:
return None
return Image.open(BytesIO(response.content)).convert("RGB")
images = list(filter(None,[download_image(url) for url in urls]))
save_path = "./inputs"
if not os.path.exists(save_path):
os.mkdir(save_path)
[image.save(f"{save_path}/{i}.jpeg") for i, image in enumerate(images)]
image_grid(images, 1, len(images))This cell will download the data to the inputs folder for the demo.
To ensure quality concept tuning, these images should be consistent across a theme, but differ in subtle ways like lighting, perspective, distance, and noise. Below is a grid showing the images we are downloaded with the image_grid.
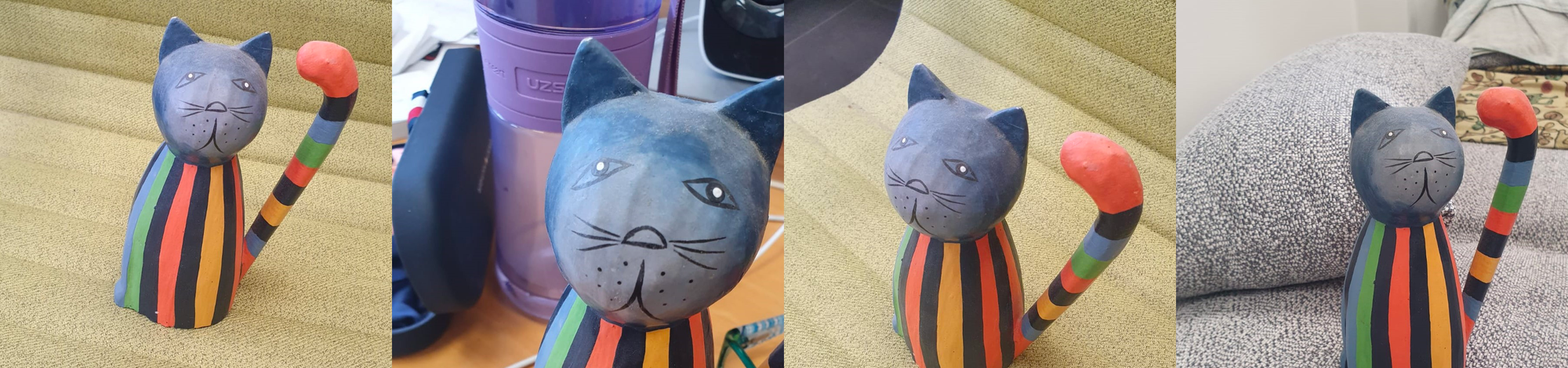
As we can see, the same image is displayed from a variety of angles and perspectives, and with diverse backgrounds to prevent over fitting.
Set training variables
#@markdown `pretrained_model_name_or_path` which Stable Diffusion checkpoint you want to use
pretrained_model_name_or_path = "runwayml/stable-diffusion-v1-5" #@param {type:"string"}Next, we will instantiate the training variables for model training and those that will correspond to the image data. We will use Runway ML's Stable Diffusion-v1-5 checkpoint for this demonstration. Be sure to click the acknowledgment to access the model on its homepage, if you have not yet done so.
#@title Settings for your newly created concept
instance_prompt = "a photo of sks toy" #@param {type:"string"}
prior_preservation = False #@param {type:"boolean"}
prior_preservation_class_prompt = "a photo of a cat toy" #@param {type:"string"}
class_prompt=prior_preservation_class_prompt
# Set your data folder path
prior_preservation_class_folder = './inputs'
class_data_root=prior_preservation_class_folder
num_class_images = len(os.listdir(prior_preservation_class_folder))
sample_batch_size = 4
prior_loss_weight = 0.5Next, we set the settings for our model training.
Theinstance_prompt is a prompt that should contain a good description of what your object or style is. It is paired together with the initializer word sks.
We can set prior_preservation to True if we want the class of the concept (e.g.: toy, dog, painting) to be guaranteed to be preserved. This increases the quality and helps with generalization at the cost of training time.
We then set prior_preservation_class_folder and class_data_root to set the input folder path.
Finally, we use that folder size to determine the number of total class images, set the batch size to 4, and set the prior_loss_weight, which determines how strong the class for prior preservation should be, to .5.
Teach the model the new concept (fine-tuning with Dreambooth)
Create Dataset classes to facilitate training
To get started teaching the desired concept, we need to instantiate the DreamBoothDataset and PromptDataset classes to handle the organization of the data inputs for training. These Dataset objects are constructed to ensure the input data is optimized for fine-tuning the model. The code for this is shown below:
#@title Setup the Classes
from pathlib import Path
from torchvision import transforms
class DreamBoothDataset(Dataset):
def __init__(
self,
instance_data_root,
instance_prompt,
tokenizer,
class_data_root=None,
class_prompt=None,
size=512,
center_crop=False,
):
self.size = size
self.center_crop = center_crop
self.tokenizer = tokenizer
self.instance_data_root = Path(instance_data_root)
if not self.instance_data_root.exists():
raise ValueError("Instance images root doesn't exists.")
self.instance_images_path = list(Path(instance_data_root).iterdir())
self.num_instance_images = len(self.instance_images_path)
self.instance_prompt = instance_prompt
self._length = self.num_instance_images
if class_data_root is not None:
self.class_data_root = Path(class_data_root)
self.class_data_root.mkdir(parents=True, exist_ok=True)
self.class_images_path = list(Path(class_data_root).iterdir())
self.num_class_images = len(self.class_images_path)
self._length = max(self.num_class_images, self.num_instance_images)
self.class_prompt = class_prompt
else:
self.class_data_root = None
self.image_transforms = transforms.Compose(
[
transforms.Resize(size, interpolation=transforms.InterpolationMode.BILINEAR),
transforms.CenterCrop(size) if center_crop else transforms.RandomCrop(size),
transforms.ToTensor(),
transforms.Normalize([0.5], [0.5]),
]
)
def __len__(self):
return self._length
def __getitem__(self, index):
example = {}
instance_image = Image.open(self.instance_images_path[index % self.num_instance_images])
if not instance_image.mode == "RGB":
instance_image = instance_image.convert("RGB")
example["instance_images"] = self.image_transforms(instance_image)
example["instance_prompt_ids"] = self.tokenizer(
self.instance_prompt,
padding="do_not_pad",
truncation=True,
max_length=self.tokenizer.model_max_length,
).input_ids
if self.class_data_root:
class_image = Image.open(self.class_images_path[index % self.num_class_images])
if not class_image.mode == "RGB":
class_image = class_image.convert("RGB")
example["class_images"] = self.image_transforms(class_image)
example["class_prompt_ids"] = self.tokenizer(
self.class_prompt,
padding="do_not_pad",
truncation=True,
max_length=self.tokenizer.model_max_length,
).input_ids
return example
class PromptDataset(Dataset):
def __init__(self, prompt, num_samples):
self.prompt = prompt
self.num_samples = num_samples
def __len__(self):
return self.num_samples
def __getitem__(self, index):
example = {}
example["prompt"] = self.prompt
example["index"] = index
return exampleLoad in model checkpoints
#@title Load the Stable Diffusion model
#@markdown Please read and if you agree accept the LICENSE [here](https://huggingface.co/runwayml/stable-diffusion-v1-5) if you see an error
# Load models and create wrapper for stable diffusion
text_encoder = CLIPTextModel.from_pretrained(
pretrained_model_name_or_path, subfolder="text_encoder"
)
vae = AutoencoderKL.from_pretrained(
pretrained_model_name_or_path, subfolder="vae"
)
unet = UNet2DConditionModel.from_pretrained(
pretrained_model_name_or_path, subfolder="unet"
)
tokenizer = CLIPTokenizer.from_pretrained(
pretrained_model_name_or_path,
subfolder="tokenizer",
)Next, we will load in the three separate components we will need to run this tuning process. These together form the full pipeline for the model. The final output for our concept will be in a similar format. Later in this tutorial, we will show how to convert this repository concept format into a classic Stable Diffusion checkpoint.
Remember, we need to visit the v1-5 checkpoint page and accept the user agreement to download these files.
Set up arguments for training
Now that the model has been set up, we need to instantiate the training parameters. By running the cell below, we instantiate the tuning arguments for the Dreambooth training process using Namespace.
#@title Setting up all training args
!mkdir outputs
save_path = 'outputs'
from argparse import Namespace
args = Namespace(
pretrained_model_name_or_path=pretrained_model_name_or_path,
resolution=512,
center_crop=True,
instance_data_dir=save_path,
instance_prompt=instance_prompt,
learning_rate=5e-06,
max_train_steps=500,
train_batch_size=1,
gradient_accumulation_steps=2,
max_grad_norm=1.0,
mixed_precision="no", # set to "fp16" for mixed-precision training.
gradient_checkpointing=True, # set this to True to lower the memory usage.
use_8bit_adam=True, # use 8bit optimizer from bitsandbytes
seed=34354,
with_prior_preservation=prior_preservation,
prior_loss_weight=prior_loss_weight,
sample_batch_size=2,
class_data_dir=prior_preservation_class_folder,
class_prompt=None,
num_class_images=num_class_images,
output_dir="dreambooth-concept",
)In particular, we may want to edit:
max_train_steps: The arguably most important argument - change this to raise or lower training epochs, which can drastically affect the outcomeseed: the seed of the sample images generated to compute the loss during training - has significant effect on final results of sample images, and what features are considered salient to the model after trainingoutput_dir: the final output directory for your trained Dreambooth conceptresolution: size of inputted training imagesmixed_precision: tell the model to use both full and half precision to accelerate training even further
Define the training function with accelerate
Here we instantiate the training function for the training run below. This uses the accelerator package to add the ability to train this function on multi-GPU configurations. Follow the comments within to see what each step of the training function takes before running the code in the cell below.
#@title Training function
from accelerate.utils import set_seed
def training_function(text_encoder, vae, unet):
logger = get_logger(__name__)
accelerator = Accelerator(
gradient_accumulation_steps=args.gradient_accumulation_steps,
mixed_precision=args.mixed_precision,
)
set_seed(args.seed)
if args.gradient_checkpointing:
unet.enable_gradient_checkpointing()
# Use 8-bit Adam for lower memory usage or to fine-tune the model in 16GB GPUs
if args.use_8bit_adam:
optimizer_class = bnb.optim.AdamW8bit
else:
optimizer_class = torch.optim.AdamW
optimizer = optimizer_class(
unet.parameters(), # only optimize unet
lr=args.learning_rate,
)
noise_scheduler = DDPMScheduler(
beta_start=0.00085, beta_end=0.012, beta_schedule="scaled_linear", num_train_timesteps=1000
)
train_dataset = DreamBoothDataset(
instance_data_root='inputs',
instance_prompt=args.instance_prompt,
class_data_root=args.class_data_dir if args.with_prior_preservation else None,
class_prompt=args.class_prompt,
tokenizer=tokenizer,
size=args.resolution,
center_crop=args.center_crop,
)
def collate_fn(examples):
input_ids = [example["instance_prompt_ids"] for example in examples]
pixel_values = [example["instance_images"] for example in examples]
# concat class and instance examples for prior preservation
if args.with_prior_preservation:
input_ids += [example["class_prompt_ids"] for example in examples]
pixel_values += [example["class_images"] for example in examples]
pixel_values = torch.stack(pixel_values)
pixel_values = pixel_values.to(memory_format=torch.contiguous_format).float()
input_ids = tokenizer.pad({"input_ids": input_ids}, padding=True, return_tensors="pt").input_ids
batch = {
"input_ids": input_ids,
"pixel_values": pixel_values,
}
return batch
train_dataloader = torch.utils.data.DataLoader(
train_dataset, batch_size=args.train_batch_size, shuffle=True, collate_fn=collate_fn
)
unet, optimizer, train_dataloader = accelerator.prepare(unet, optimizer, train_dataloader)
# Move text_encode and vae to gpu
text_encoder.to(accelerator.device)
vae.to(accelerator.device)
# We need to recalculate our total training steps as the size of the training dataloader may have changed.
num_update_steps_per_epoch = math.ceil(len(train_dataloader) / args.gradient_accumulation_steps)
num_train_epochs = math.ceil(args.max_train_steps / num_update_steps_per_epoch)
# Train!
total_batch_size = args.train_batch_size * accelerator.num_processes * args.gradient_accumulation_steps
logger.info("***** Running training *****")
logger.info(f" Num examples = {len(train_dataset)}")
logger.info(f" Instantaneous batch size per device = {args.train_batch_size}")
logger.info(f" Total train batch size (w. parallel, distributed & accumulation) = {total_batch_size}")
logger.info(f" Gradient Accumulation steps = {args.gradient_accumulation_steps}")
logger.info(f" Total optimization steps = {args.max_train_steps}")
# Only show the progress bar once on each machine.
progress_bar = tqdm(range(args.max_train_steps), disable=not accelerator.is_local_main_process)
progress_bar.set_description("Steps")
global_step = 0
for epoch in range(num_train_epochs):
unet.train()
for step, batch in enumerate(train_dataloader):
with accelerator.accumulate(unet):
# Convert images to latent space
with torch.no_grad():
latents = vae.encode(batch["pixel_values"]).latent_dist.sample()
latents = latents * 0.18215
# Sample noise that we'll add to the latents
noise = torch.randn(latents.shape).to(latents.device)
bsz = latents.shape[0]
# Sample a random timestep for each image
timesteps = torch.randint(
0, noise_scheduler.config.num_train_timesteps, (bsz,), device=latents.device
).long()
# Add noise to the latents according to the noise magnitude at each timestep
# (this is the forward diffusion process)
noisy_latents = noise_scheduler.add_noise(latents, noise, timesteps)
# Get the text embedding for conditioning
with torch.no_grad():
encoder_hidden_states = text_encoder(batch["input_ids"])[0]
# Predict the noise residual
noise_pred = unet(noisy_latents, timesteps, encoder_hidden_states).sample
if args.with_prior_preservation:
# Chunk the noise and noise_pred into two parts and compute the loss on each part separately.
noise_pred, noise_pred_prior = torch.chunk(noise_pred, 2, dim=0)
noise, noise_prior = torch.chunk(noise, 2, dim=0)
# Compute instance loss
loss = F.mse_loss(noise_pred, noise, reduction="none").mean([1, 2, 3]).mean()
# Compute prior loss
prior_loss = F.mse_loss(noise_pred_prior, noise_prior, reduction="none").mean([1, 2, 3]).mean()
# Add the prior loss to the instance loss.
loss = loss + args.prior_loss_weight * prior_loss
else:
loss = F.mse_loss(noise_pred, noise, reduction="none").mean([1, 2, 3]).mean()
accelerator.backward(loss)
if accelerator.sync_gradients:
accelerator.clip_grad_norm_(unet.parameters(), args.max_grad_norm)
optimizer.step()
optimizer.zero_grad()
# Checks if the accelerator has performed an optimization step behind the scenes
if accelerator.sync_gradients:
progress_bar.update(1)
global_step += 1
logs = {"loss": loss.detach().item()}
progress_bar.set_postfix(**logs)
if global_step >= args.max_train_steps:
break
accelerator.wait_for_everyone()
# Create the pipeline using using the trained modules and save it.
if accelerator.is_main_process:
pipeline = StableDiffusionPipeline(
text_encoder=text_encoder,
vae=vae,
unet=accelerator.unwrap_model(unet),
tokenizer=tokenizer,
scheduler=PNDMScheduler(
beta_start=0.00085, beta_end=0.012, beta_schedule="scaled_linear", skip_prk_steps=True
),
safety_checker=StableDiffusionSafetyChecker.from_pretrained("CompVis/stable-diffusion-safety-checker"),
feature_extractor=CLIPFeatureExtractor.from_pretrained("openai/clip-vit-base-patch32"),
)
pipeline.save_pretrained(args.output_dir)Run training
#@title Run training
import accelerate
accelerate.notebook_launcher(training_function, args=(text_encoder, vae, unet), num_processes =1)
with torch.no_grad():
torch.cuda.empty_cache()Finally, we are ready to begin fine tuning our Dreambooth concept. If we are using more than one GPU, we may now take advantage of accelerate and change the num_processes argument accordingly.
Set up the inference pipeline
Bring this project to life
Once training has completed, we can use the code in the inference section to sample the model with any prompt.
#@title Set up the pipeline
try:
pipe
except NameError:
pipe = StableDiffusionPipeline.from_pretrained(
args.output_dir,
torch_dtype=torch.float16,
).to("cuda")We first instantiate the pipe in half precision format for less expensive sampling. The StableDiffusionPipeline.from_pretrained() function takes in our path to the concept directory to load in the fine-tuned model using the binary files inside. We can then load our prompt variable into this pipeline to generate images corresponding to our desired output.
#@title Run the Stable Diffusion pipeline
prompt = "a photo of a sks cat toy riding a bicycle" #@param {type:"string"}
num_samples = 3 #@param {type:"number"}
num_rows = 3 #@param {type:"number"}
all_images = []
for _ in range(num_rows):
images = pipe([prompt] * num_samples, num_inference_steps=75, guidance_scale=7.5, seed = 'random').images
all_images.extend(images)
grid = image_grid(all_images, num_samples, num_rows)
grid Following the demo, our prompt "a photo of a sks cat toy riding a bicycle" is called. We can then use num_samples and num_rows with the image_grid function to place them within a single photo grid. Let's look at an example of these images generated with the prompt "a photo of a sks cat toy riding a bicycle" from a model trained on the sample images for a relatively short 250 epochs:

As we can see, it conserved a lot of the qualities of the original cat toy images. One of the images, the bottom center, is nearly identical to the original object. The rest of the images show varying degrees of qualities from the original sample as the model tries to place it on the bicycle. This happens for a simple reason: a cat riding a bike likely isn't present in the original data, so it makes sense it would be more difficult to recreate with diffusion than just scattered features. The final images instead showcase a randomized collection of aspects of the Dreambooth concept unified randomly with different features related to the prompt, but we can see how these images could represent our prompt with more training.
Let's examine the results from a similar concept extended to 500 epochs of training:

As you can see, several of these samples are more accurately approximating the human, qualitative interpretation of the prompt than the 250 epoch concept. In particular, the three samples in the middle row show all of the features of a clay cat toy riding a mostly accurate bicycle. The other rows feature a more realistic cat object, but still show more complete bicycle images than the previous test. This difference is likely due to a lack of a confounding effect in the further trained model during inference from the concept object's features. By being more exposed to the initial data, the recreation of the central object in the concept is less likely to interfere with the generation of the additional features extrapolated from the prompt - in this case a bicycle.
Furthermore, it is important to call attention to the consistent variation across each row caused by the random seed. Each row shows similar salient features that are not conserved across the entire grid. This shows clear evidence the seed effectively controls the randomness of the concept's inference. A seed is also applied during training, and altering it can have major effects on the results of concept training. Be sure to test out various seeds in both tasks to get the best for your final outputs.
To continue on from this stage, it's recommended to try extending your training to 1000 epochs to see how our outputs improve or degrade. As the number of epochs grow, we need to be wary of overfitting. If our inputted images are not variable enough in terms of background features and perspectives of object, and training is extensive enough, it will be difficult to manipulate the objects out of their original positions during generation due to this over training. Make sure the input images contain diverse content to ensure a more robust final output for inference.
Convert the model from Diffusers format to original Stable Diffusion checkpoint file
Finally, now that we have finished creating our Dreambooth concept, we are left with a Diffusers compatible folder at the directory dreambooth-concept. If we want to use this with classic Stable Diffusion scripts or other projects like the Stable Diffusion Web UI (which is now easily run from the Stable Diffusion Gradient Notebook Runtime), then we can use the following script to create a shareable, downloadable .ckpt file.
# Params
# --model_path = Path to the model to convert.
# --checkpoint_path = Path to the output model.
# --half = store_true, Save weights in half precision/
!git clone https://github.com/huggingface/diffusers
%cd diffusers/scripts
!python convert_diffusers_to_original_stable_diffusion.py --model_path <path to dreambooth concept> --checkpoint_path <name/path of your new model>
%cd ~/../notebooks
This script will clone the huggingface/diffusers library to our Notebook. We then change directories into scripts to make use of the convert_diffusers_to_original_stable_diffusion.py script. Simply input the model_path as the path to your repository holding the Dreambooth concept, the desired output path and name for your new checkpoint to checkpoint_path, and use the half flag if you would like to save it in half precision format for less computationally expensive inference.
Closing thoughts
This tutorial was based on the notebook from the HuggingFace Notebooks repo's Diffusers section. In this session, we walked through each of the steps for creating a Dreambooth concept from scratch within a Gradient Notebook, and demonstrated how this notebook can be re-applied to any type of image data to generate new concepts. Afterwards, we demonstrated how to sample the new concept within the Notebook to generate novel images from text prompts that contain features corresponding to the original concept, and discussed the effects of lengthening training and changing the seed during training and inference. Finally, we concluded by showing how to extract this concept as a .ckpt file, so that it can be re-used in other projects.
Be sure to check back soon for part 2 of this tutorial series, where we will look at Textual Inversion image embeddings, and show how to integrate the technique with Dreambooth to create truly accurate generated images to the original concept.