
Image localization is an interesting application for me, as it falls right between image classification and object detection. This is the second part of the Object Localization series using PyTorch, so do check out the previous part if you haven't here.
Be sure to follow along the IPython Notebook on Gradient, and fork your own version to try it out!
Dataset Visualization
Let us visualize the dataset with the bounding boxes before getting into the machine learning portion of this tutorial. Here we can see how to retrieve the coordinates through multiplication with image size. We are using OpenCV to display the image. This will print out a sampling of 20 images with their bounding boxes.
# Create a Matplotlib figure
plt.figure(figsize=(20,20));
# Generate a random sample of images each time the cell is run
random_range = random.sample(range(1, len(img_list)), 20)
for itr, i in enumerate(random_range, 1):
# Bounding box of each image
a1, b1, a2, b2 = boxes[i];
img_size = 256
# Rescaling the boundig box values to match the image size
x1 = a1 * img_size
x2 = a2 * img_size
y1 = b1 * img_size
y2 = b2 * img_size
# The image to visualize
image = img_list[i]
# Draw bounding boxes on the image
cv2.rectangle(image, (int(x1),int(y1)),
(int(x2),int(y2)),
(0,255,0),
3);
# Clip the values to 0-1 and draw the sample of images
img = np.clip(img_list[i], 0, 1)
plt.subplot(4, 5, itr);
plt.imshow(img);
plt.axis('off');
Dataset Splitting
We have got our dataset in img_list, labels, and boxes, and now we must split the dataset before we jump on to DataLoaders. As usual, we shall use the train_test_split method from the sklearn library for this task.
# Split the data of images, labels and their annotations
train_images, val_images, train_labels, \
val_labels, train_boxes, val_boxes = train_test_split( np.array(img_list),
np.array(labels), np.array(boxes), test_size = 0.2,
random_state = 43)
print('Training Images Count: {}, Validation Images Count: {}'.format(
len(train_images), len(val_images) ))Now we have gotten a quick glance at our dataset through visualization, and we have completed dataset splitting. Let us move on to building our custom PyTorch DataLoaders for our dataset, which is currently scattered around in variables.
Custom DataLoaders in Pytorch
DataLoaders, as the name suggests, return an object that will handle the entire data provision system while we will be training the model. It provides features like shuffle while creating the object, it has a 'getitem' method which handles what should be your data input in each iteration, and all these things let you engineer everything the way you wish without making the code messy in the training part. This allows you to focus on other optimizations more. Let us start the PyTorch section with imports.
from PIL import Image
import torch
import torchvision
from torchvision.transforms import ToTensor
import torchvision.transforms as transforms
import numpy as np
import matplotlib.pyplot as plt
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
import os
import pickle
import random
import timeOne of the important things to do, if you can, are to use GPUs for training ML models, especially when the objective is huge. If running in Paperspace Gradient, choose a machine with a GPU.
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
device
>>>device(type='cuda')
The above output indicates that you have a GPU, and device can be used to convert data and models to GPU for leveraging. Moving ahead to DataLoaders.
class Dataset():
def __init__(self, train_images, train_labels, train_boxes):
self.images = torch.permute(torch.from_numpy(train_images),(0,3,1,2)).float()
self.labels = torch.from_numpy(train_labels).type(torch.LongTensor)
self.boxes = torch.from_numpy(train_boxes).float()
def __len__(self):
return len(self.labels)
# To return x,y values in each iteration over dataloader as batches.
def __getitem__(self, idx):
return (self.images[idx],
self.labels[idx],
self.boxes[idx])
# Inheriting from Dataset class
class ValDataset(Dataset):
def __init__(self, val_images, val_labels, val_boxes):
self.images = torch.permute(torch.from_numpy(val_images),(0,3,1,2)).float()
self.labels = torch.from_numpy(val_labels).type(torch.LongTensor)
self.boxes = torch.from_numpy(val_boxes).float()
Here we will create the Dataset class, first by loading the image, labels, and the boxes coordinates, scaled into the range of [0-1] to class variables. We then use the 'getitem' to design the loader output in each iteration. Similarly, we shall build the ValDataset (validation dataset) DataLoader class. As the structure and the nature of data is the same, we will inherit from the above class.
Now that we have the Classes of DataLoaders, let us right away create the data loader objects from the respective classes.
dataset = Dataset(train_images, train_labels, train_boxes)
valdataset = ValDataset(val_images, val_labels, val_boxes)Now that we have completed our journey with preparing the data, let us move to the Machine Learning model part of the tutorial. We will be doing the object localization implementation using a fairly simple set of Convolutional Neural Networks, and this will help us adapt the concept to our understanding. We can experiment with various aspects of this architecture including using a pre-trained model like Alexnet. I would encourage you to learn more about optimizers, loss functions, and hyper tuning models to master the skill of architecture design for future projects.
Model Architecture
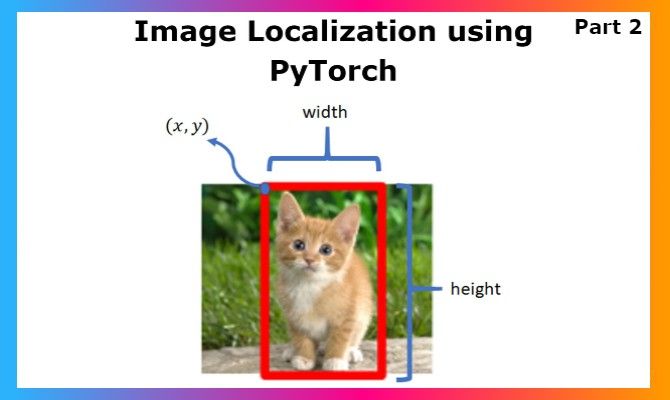
So to understand how we have to design the architecture, we have to first understand input and outputs. Here the input is a batch of images, so it will be stylized like (BS, C, H, W). BS being Batch Size and then Channels, Height, and Weight. The order is important, as in PyTorch that's how images are stored. In TensorFlow, it is (H, W, C) for each image.
Coming to outputs, we have 2 outputs as we have been discussing since the beginning of the previous blog. First is your classification output which will be of size (1, N), N being the number of classes. The second output is of size (1, 4) which is xmin, ymin, xmax, and ymax but in the range of (0,1). This helps you scale the coordinates according to image size later. So the output will be (CLF, BOX), the first being classification as discussed above, and the other coordinates.
Now, interpreting from the Machine Learning part, CLF will be used to get the class index by using argmax on the output, and we can add a softmax activation function at the end for probabilistic outputs. BOX outputs will be generated after passing through the sigmoid activation function which makes the range (0,1). That said, everything else is similar to a conventional image classification model. Let's look at the code.
class Network(nn.Module):
def __init__(self):
super(Network, self).__init__()
# CNNs for rgb images
self.conv1 = nn.Conv2d(in_channels=3, out_channels=6, kernel_size=5)
self.conv2 = nn.Conv2d(in_channels=6, out_channels=12, kernel_size=5)
self.conv3 = nn.Conv2d(in_channels=12, out_channels=24, kernel_size=5)
self.conv4 = nn.Conv2d(in_channels=24, out_channels=48, kernel_size=5)
self.conv5 = nn.Conv2d(in_channels=48, out_channels=192, kernel_size=5)
# Connecting CNN outputs with Fully Connected layers for classification
self.class_fc1 = nn.Linear(in_features=1728, out_features=240)
self.class_fc2 = nn.Linear(in_features=240, out_features=120)
self.class_out = nn.Linear(in_features=120, out_features=2)
# Connecting CNN outputs with Fully Connected layers for bounding box
self.box_fc1 = nn.Linear(in_features=1728, out_features=240)
self.box_fc2 = nn.Linear(in_features=240, out_features=120)
self.box_out = nn.Linear(in_features=120, out_features=4)
def forward(self, t):
t = self.conv1(t)
t = F.relu(t)
t = F.max_pool2d(t, kernel_size=2, stride=2)
t = self.conv2(t)
t = F.relu(t)
t = F.max_pool2d(t, kernel_size=2, stride=2)
t = self.conv3(t)
t = F.relu(t)
t = F.max_pool2d(t, kernel_size=2, stride=2)
t = self.conv4(t)
t = F.relu(t)
t = F.max_pool2d(t, kernel_size=2, stride=2)
t = self.conv5(t)
t = F.relu(t)
t = F.avg_pool2d(t, kernel_size=4, stride=2)
t = torch.flatten(t,start_dim=1)
class_t = self.class_fc1(t)
class_t = F.relu(class_t)
class_t = self.class_fc2(class_t)
class_t = F.relu(class_t)
class_t = F.softmax(self.class_out(class_t),dim=1)
box_t = self.box_fc1(t)
box_t = F.relu(box_t)
box_t = self.box_fc2(box_t)
box_t = F.relu(box_t)
box_t = self.box_out(box_t)
box_t = F.sigmoid(box_t)
return [class_t,box_t]Let us next instantiate the model, and get it to use the GPU(s) if available. This can really accelerate the training process, especially for a huge objective like image localization. We shall also see the model summary after that.
model = Network()
model = model.to(device)
modelWe can visualize the model later using the ONNX format and netron website after training to evaluate intricate details like weights and much more. For now, we can write a small function to calculate the number of correct predictions for each batch of training.
def get_num_correct(preds, labels):
return torch.round(preds).argmax(dim=1).eq(labels).sum().item()Now we shall create the data loaders for both training and validation datasets for feeding batches of images while training.
dataloader = torch.utils.data.DataLoader(
dataset, batch_size=32, shuffle=True)
valdataloader = torch.utils.data.DataLoader(
valdataset, batch_size=32, shuffle=True)Here we can have more parameters like num_workers in the Dataloader method which can help us improve the loading time, where 2 is usually the best value that enables pipelining to the data loading process. Now we are going to create the training function, the most important part of every ML project. We will keep the process simple for all to understand every part of training. We shall focus on improving validation accuracy through the process.
Bring this project to life
Model Training and Validation
def train(model):
# Defining the optimizer
optimizer = optim.SGD(model.parameters(),lr = 0.1)
num_of_epochs = 30
epochs = []
losses = []
# Creating a directory for storing models
os.mkdir('models')
for epoch in range(num_of_epochs):
tot_loss = 0
tot_correct = 0
train_start = time.time()
model.train()
for batch, (x, y, z) in enumerate(dataloader):
# Converting data from cpu to GPU if available to improve speed
x,y,z = x.to(device),y.to(device),z.to(device)
# Sets the gradients of all optimized tensors to zero
optimizer.zero_grad()
[y_pred,z_pred]= model(x)
# Compute loss (here CrossEntropyLoss)
class_loss = F.cross_entropy(y_pred, y)
box_loss = F.mse_loss(z_pred, z)
(box_loss + class_loss).backward()
# class_loss.backward()
optimizer.step()
print("Train batch:", batch+1, " epoch: ", epoch, " ",
(time.time()-train_start)/60, end='\r')
model.eval()
for batch, (x, y,z) in enumerate(valdataloader):
# Converting data from cpu to GPU if available to improve speed
x,y,z = x.to(device),y.to(device),z.to(device)
# Sets the gradients of all optimized tensors to zero
optimizer.zero_grad()
with torch.no_grad():
[y_pred,z_pred]= model(x)
# Compute loss (here CrossEntropyLoss)
class_loss = F.cross_entropy(y_pred, y)
box_loss = F.mse_loss(z_pred, z)
# Compute loss (here CrossEntropyLoss)
tot_loss += (class_loss.item() + box_loss.item())
tot_correct += get_num_correct(y_pred, y)
print("Test batch:", batch+1, " epoch: ", epoch, " ",
(time.time()-train_start)/60, end='\r')
epochs.append(epoch)
losses.append(tot_loss)
print("Epoch", epoch, "Accuracy", (tot_correct)/2.4, "loss:",
tot_loss, " time: ", (time.time()-train_start)/60, " mins")
torch.save(model.state_dict(), "model_ep"+str(epoch+1)+".pth")Let's go through this in detail. The optimizer we will use is Stochastic Gradient Descent, but you could try out other optimization techniques like Adam if you desire.
We will deal with training and validation individually. To keep track of time during the training, we can use the train_start variable. This turns out to be pretty useful while working on paid GPU instances for calculating the time for training, which will help you plan ahead before multiple retraining.
By default, PyTorch models are set to train (self.training = True). We shall discuss why we are toggling the state and its effects when we reach the validation segment of the code.
From the data loaders we created, we access each batch of data consisting of x,y, and z, which are images, labels, and bounding boxes respectively. Then we convert each of them to our preferred device, i.e. to GPU if it’s available. The optimizers handle the backpropagation in Deep Learning, so before training, we set the gradients to zero for each batch which is done through optimizer.zero_grad().
After feeding the input(x) to the model, we move to loss calculation. This is an important part, as two types of losses are involved here: Cross-Entropy loss for classification problems, and Mean Squared Error for the regression part of finding bounding box coordinates. If we observe here, we can see how we send the sum of losses for backpropagation instead of individual treatment.
Afterwards, the evaluation segment of the code is similar to the training part, except for the fact that we do not do backpropagation. Once we move to the validation part, we toggle the model state to eval using model.eval(). As we discussed earlier, the model is by default in training state, and the toggle matters a lot. Some layers have different behavior during train/and evaluation (like BatchNorm, Dropout) which in turn affects the overall performance. This is an interesting point as when the model is in the training state, BatchNorm uses per-batch statistics, and the Dropout Layers are activated. But when the model is in evaluation (inference) mode, BatchNorm layers use running statistics, and Dropout Layers are deactivated. Something to note here is that neither of these function calls run forward / backward passes. They tell the model how to act when it is run. This is important as some modules (layers) are designed to behave differently during training vs inference, and the model will produce unexpected results if run in the wrong mode. Here, we calculate the accuracy using our previous written function to find the number of correct predictions.
In this example, we will train for 30 epochs, but that is arbitrary, and we are free to experiment with longer or shorter epoch values.
The last thing about the training process we must select is how we save the model. Popularly in PyTorch, we can save models in two ways. One is where we save the entire mode as it is, including the weights, structure, and all; which is perfect if we are sure about the production PyTorch version matching with the development one. In certain cases, PyTorch models save this way can come out too heavy for deployment when you have size limitations around 500MB. Another way of approaching how we save models is through creating a state_dict(), which only saves the model's learnable parameter's states as python dictionaries. This makes it more modular in form, as in production, to resurrect the model, you will have to provide the state_dict() of the model and the model architecture (Network in our case). It is almost like providing muscles and skeleton to resurrect a life, which is convenient and flexible as we can decide the PyTorch version, and if needed, use a PyTorch cpu-only version, which will reduce the overall package size, and this approach is very useful. I encourage you to read more about the state_dict() to broaden your understanding. That being said, saving all the model data is the safest way if there are no memory storage constraints. Else opting techniques like early stopping will help you get the best model without missing it.
Once you understand the training function, let's go ahead and start the training.
train(model)One important thing to understand here is that if you wish to re-train, you have to re-initialize the model. A re-training without that step will just add on to the existing model parameters. So, a good way to deal with this potential problem is initializing the model just before training to repeat the same again.
The validation accuracy depends on a lot of things, and you may not get a good one on the first try. The dataset I have provided to test the implementation is a minimal one, and you must have a more elaborate and general dataset to get a true test of your model. Some of the other ways to improve the model are through data augmentations techniques etc. I have written a detailed article on the topic of improving accuracy, so give it a read if your model remains needing improvement.
Model Testing/Inference
When it comes to image localization, the prediction is not just getting an output from the model. We will also have to process the bounding box coordinates to generate an actual bounding box to visualize the result, and this might help even in the production. This section will have 3 major components, Prediction Script, Pre Processing, and Post Processing script, so let's jump into it.
Pre Processing
While working on a machine learning production, it is important that the data you feed to the model is pre-processed exactly the same way as that of the data you fed while training. Resizing is one of the most common preprocessing for any image-related models in the inference stage. Here our image size is 256.
def preprocess(img, image_size = 256):
image = cv2.resize(img, (image_size, image_size))
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
image = image.astype("float") / 255.0
# Expand dimensions as predict expect image in batches
image = np.expand_dims(image, axis=0)
return imagePost Processing
Once we get the outputs, they will be in the form of [CLF, BOX] in simpler terms, and we will have to work with the bounding box values to create the results with visualization. The bounding box inputs were scaled to the range of [0,1] , and, as we use the sigmoid activation function at the end, our predictions are in the range of [0,1], as well. We will have to rescale them to get out xmin, ymin, etc. For that, we just have to multiply the values with the image size (256 here).
def postprocess(image, results):
# Split the results into class probabilities and box coordinates
[class_probs, bounding_box] = results
# First let's get the class label
# The index of class with the highest confidence is our target class
class_index = torch.argmax(class_probs)
# Use this index to get the class name.
class_label = num_to_labels[class_index]
# Now you can extract the bounding box too.
# Get the height and width of the actual image
h, w = 256,256
# Extract the Coordinates
x1, y1, x2, y2 = bounding_box[0]
# # Convert the coordinates from relative (i.e. 0-1) to actual values
x1 = int(w * x1)
x2 = int(w * x2)
y1 = int(h * y1)
y2 = int(h * y2)
# return the lable and coordinates
return class_label, (x1,y1,x2,y2),torch.max(class_probs)*100Now that we have both pre-process and post-process, let's jump into the prediction script.
Prediction Script
In the prediction script, we get the model architecture first from our earlier network, and then we move the model to our preferred device: a GPU from our Gradient Notebook. Once that's done we load the model's state_dict() as we had discussed earlier in the validation. We set the model to eval state, and use the pre-processing function to get the image ready to be fed to the model. We can then use the permute function in PyTorch to re-make the image array to [N,C,H,W] from [N,H,W,C] . The result is given to the postprocessing function which gives back the actual coordinates and label. Finally, we use matplotlib to plot the resulting image with a bounding box.
# We will use this function to make prediction on images.
def predict(image, scale = 0.5):
model = Network()
model = model.to(device)
model.load_state_dict(torch.load("models/model_ep29.pth"))
model.eval()
# Reading Image
img = cv2.imread(image)
# # Before we can make a prediction we need to preprocess the image.
processed_image = preprocess(img)
result = model(torch.permute(torch.from_numpy(processed_image).float(),(0,3,1,2)).to(device))
# After postprocessing, we can easily use our results
label, (x1, y1, x2, y2), confidence = postprocess(image, result)
# Now annotate the image
cv2.rectangle(img, (x1, y1), (x2, y2), (0, 255, 100), 2)
cv2.putText(
img,
'{}, CONFIDENCE: {}'.format(label, confidence),
(30, int(35 * scale)),
cv2.FONT_HERSHEY_COMPLEX, scale,
(200, 55, 100),
2
)
# Show the Image with matplotlib
plt.figure(figsize=(10,10))
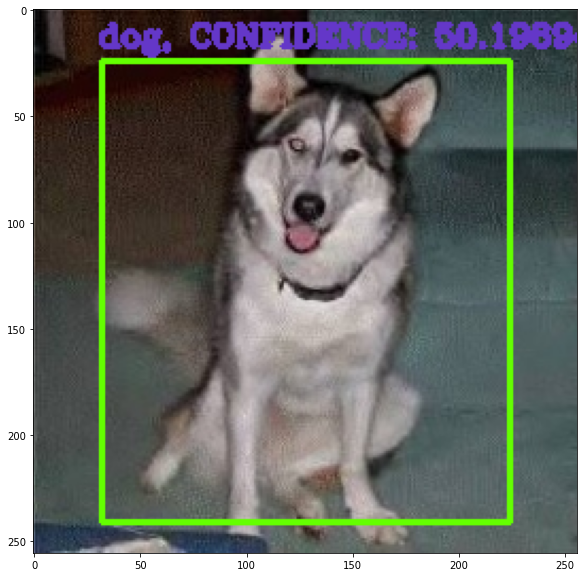
plt.imshow(img[:,:,::-1])Let us go ahead and do the inference on an image.
image = '< IMAGE PATH >'
predict(image)The output is given below and you can see how we got a bounding box over the image.
ONNX and Model Architecture Visualization
As we had mentioned earlier, we can use netron to visualize our model along with its weights and more. We can convert our model to ONNX format for this purpose. ONNX format is a general machine learning model storage format accepted by platforms like Snap Lens Studio, and it's also one of the frameworks deployable on Gradient. A model built on TensorFlow and PyTorch can be converted to ONNX where both achieve the same form and functionality. Here is how we will do it. After obtaining the '.ONNX' file you can visit netron for more in depth model visualization.
model = Network()
model = model.to(device)
model.load_state_dict(torch.load('models/model_ep29.pth'))
model.eval()
random_input = torch.randn(1, 3, 256, 256, dtype=torch.float32).to(device)
# you can add however many inputs your model or task requires
input_names = ["input"]
output_names = ["cls","loc"]
torch.onnx.export(model, random_input, 'localization_model.onnx', verbose=False,
input_names=input_names, output_names=output_names,
opset_version=11)
print("DONE")Conclusion
Image localization as we have been discussing is an interesting field of study, and it is a bit more difficult to get accuracy in this compared to an image classification problem. Here we do not just have to get the classification right, but get a tight and correct bounding box too. Handling both makes it complex for the model, so improving the dataset and architecture will help you there. I hope this detailed two-part article on implementing image localization was helpful, and I encourage you to read more on the same.











