Bring this project to life
Introduction
YOLO is a state of the art object detection algorithm, and due to its processing power - it has become almost a standard way of detecting objects in the field of computer vision. Earlier, people used techniques like sliding windows, RCNN, fast RCNN, and faster RCNN for object detection.
But in 2015, YOLO (You Only Look Once) was invented, and this algorithm and its successors began outperforming all others.
In this article, we present the newest iteration of the renowned real-time object detection and image segmentation model, Ultralytics’ YOLOv8. This version harnesses the latest developments in deep learning and computer vision, delivering exceptional speed and accuracy. Its efficient design caters to a wide range of applications and can be seamlessly adjusted to diverse hardware platforms, spanning from edge devices to cloud APIs, thanks to its implementation in the easy to use Ultralytics Python package.
YOLO is a state-of-the-art (SOTA) object detection algorithm, and it is so fast that it has become one of the standard ways of detecting objects in the field of computer vision. Previously, sliding window operations were most common in object detection. Then came improvements and faster versions of object detection were introduced such as CNN, R-CNN, Fast RCNN and many more.
Through this article we will explore a comprehensive guide to understand a few concepts behind this amazing model for object detection. We will dive deep into the features and understand the advancements of YOLOv8, how to implement it in a custom dataset seamlessly using the platform provided by Paperspace, and try to understand the evolution of YOLO and the challenges and limitations developing the previous YOLO versions.
Brief overview of object detection in computer vision
Object detection can be thought of as the union of two computer vision sub-disciplines: object localization and image classification. It involves recognizing specific classes of objects (like humans, animals, or cars). Its primary aim is to create computational methods and models that answer a fundamental question in computer vision: the identification and location of objects. Object detection algorithms can be divided into two main categories: single-shot detectors and two-stage detectors.
This classification is based on the number of times the same input image is passed through a network.
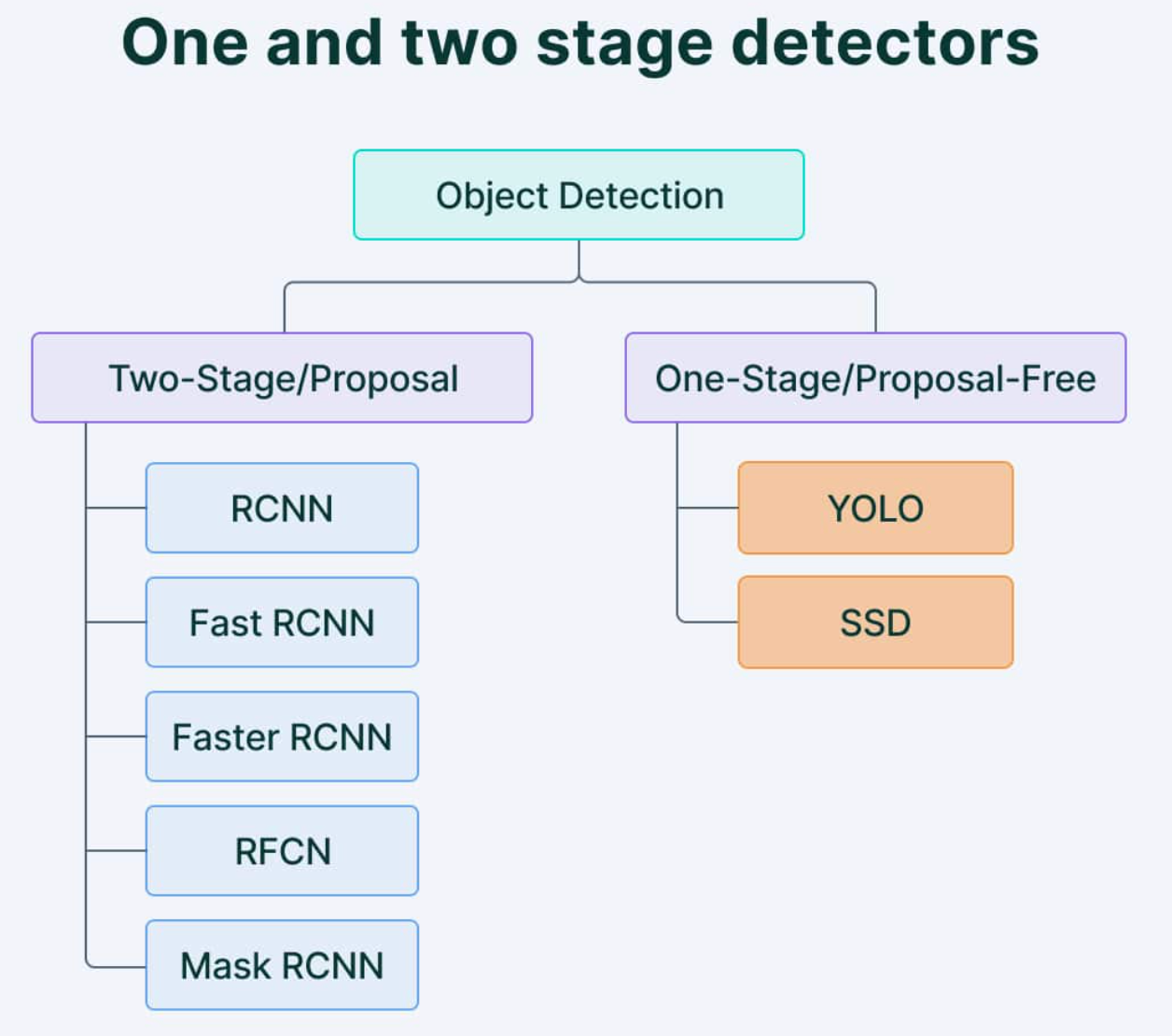
Image from V7labs
The key evaluation metrics for object detection are accuracy, encompassing classification and localization precision, and swiftness. Object detection serves as a base for many other computer vision tasks, such as segmentation, image captioning, object tracking and more. Object detection is widely used in many real-world applications, such as autonomous driving, robot vision, video surveillance, etc. One of the recent examples is the object detection system in Tesla cars, which is designed to identify other vehicles, pedestrians, animals, road signs, lane markers, and any obstacles that the vehicle may encounter on the road.
In the below image, we can review the history of object detection and how far this technology has evolved from traditional object detection to deep learning based detection.
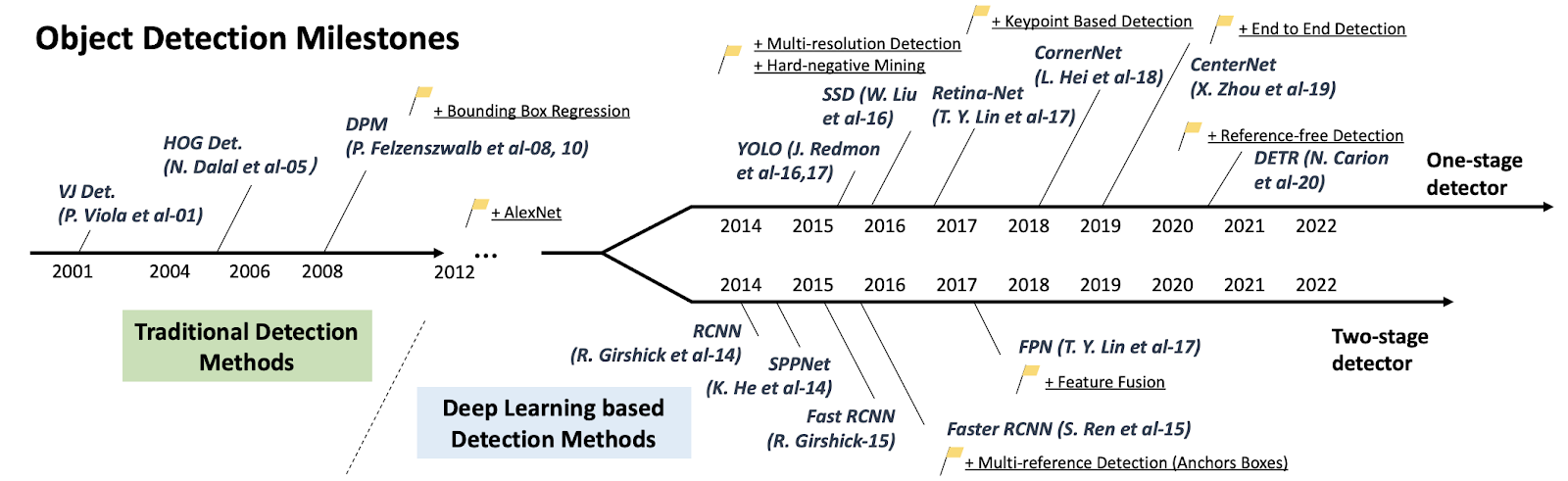
A road map of object detection. Milestone detectors in this figure: VJ Det., HOG Det., DPM, RCNN, SPPNet, Fast RCNN, Faster RCNN, YOLO, SSD, FPN, Retina-Net, CornerNet, CenterNet, DETR.
Introduction to YOLO (You Only Look Once) and its importance
YOLO was proposed by R. Joseph (PJ Reddie) in the year 2015. The speed of YOLO was exceptionally high compared to other object detection options at the time; a quicker iteration achieves 155 frames per second and maintains a VOC07, Mean average precision (mAP) of 52.7%. In contrast, an upgraded version operates at a speed of 45 frames per second while achieving a higher VOC07 mAP of 63.4%.
The YOLO approach diverges significantly from two-stage detectors by employing a single neural network on the entire image. This network segments the image into regions and predicts bounding boxes and probabilities for each region concurrently. This results in an increased speed during the detection process. Despite its significant enhancement in detection speed, YOLO experiences a decrease in localization accuracy when compared to two-stage detectors, particularly in detecting small objects. YOLO’s subsequent versions have paid more attention to this problem.
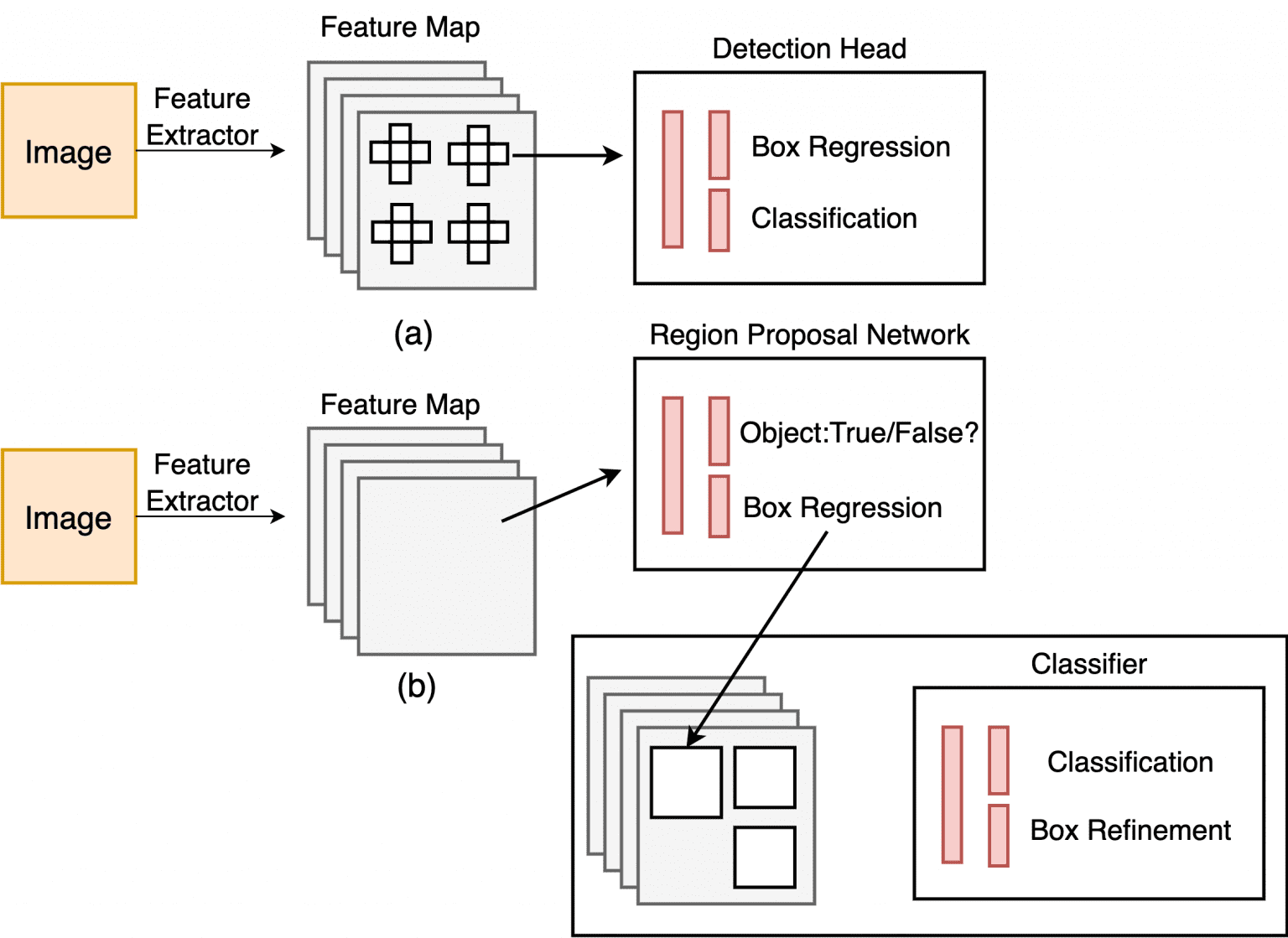
Single-shot object detection
Single-shot object detection swiftly analyzes entire images in one go for identifying objects, but tends to be less accurate than other methods and might struggle with detecting smaller objects. Despite this, it's computationally efficient and suitable for real-time detection in resource-limited settings. YOLO, a single-shot detector, employs a fully convolutional neural network for image processing.
Two-shot object detection
While in two-shot or two stage object detection involves employing two rounds of the input image to forecast the existence and positioning of objects. The initial round generates a series of proposals or potential object locations, while the subsequent round enhances these proposals to make conclusive predictions. While more precise than single-shot object detection, this method also incurs greater computational expense.
Applications on various domains
YOLO (You Only Look Once) has found various applications across different domains due to its real-time object detection capabilities. Some of its applications include:
- Surveillance and Security: YOLO is used for real-time monitoring in surveillance systems, identifying and tracking objects or individuals in video streams
- Autonomous Vehicles: It's employed in self-driving cars and autonomous systems to detect pedestrians, vehicles, and objects on roads, aiding in navigation and collision avoidance
- Retail: YOLO can be used for inventory management, monitoring stock levels, and even for applications like smart retail shelves or cashier-less stores
- Healthcare: It has potential in medical imaging for the detection and analysis of anomalies or specific objects in medical scans
- Augmented Reality (AR) and Virtual Reality (VR): YOLO can assist in AR applications for recognizing and tracking objects or scenes in real time
- Robotics: YOLO is used for object recognition and localization in robotics, enabling robots to perceive and interact with their environment more effectively
- Environmental Monitoring: It can be applied in analyzing satellite images or drone footage for environmental studies, like tracking wildlife or assessing land use
- Industrial Automation: YOLO can assist in quality control processes by identifying defects or anomalies in manufacturing lines
The ability of YOLO to perform real-time object detection with reasonably good accuracy makes it versatile for a wide range of applications that require swift and accurate object recognition.
How does YOLO work?
Let us assume we are working on an image classification problem and we want to understand if the given image is of a person or of a dog, in that case the output of a neural network is simple. It will output 1 if a dog is present or 0 if there are no dogs present in the image.

When we talk about object localization, the problem is not only the class, but where the object is present in the image. This is done by drawing a bounding box or determining the position of the image within the image.
In short, the YOLO model is trained on labeled datasets, optimizing the model parameters to minimize the difference between predicted bounding boxes and ground truth bounding boxes. With the help of bounding box coordinates and the class probability we not not only have the detected object, we also have the answer to object localization.
Now let’s get into a bit more detail, and break down what we just described.
The YOLO algorithm takes an image an input and is passed to deep Convolutional Neural Network and this neural network generates an output in the form of a vector that appears similar to this [Pc, bx, by, bw, bh, c1, c2, c3]. For convenience let us denote this vector by n.
- Pc is the probability of the class which shows if an object is present or not
- bx, by, bw, bh specifies the coordinates of the bounding box from the center point of the object
- c1, c2, c3 represents the classes which are present in the image. For example c1=1 if it is a dog and rest will be 0. Similarly, if c2 represents human c2 will be equal to 1 and rest of the classes will be 0. if there is no object present in the image, the vector will be [0,?,?,?,...?]. In this case, the Pc will be 0 and the rest of the elements in the vector will not matter
- This is fed to the neural network. Here we have provided one example, but in the real world a huge number of images are provided as the training set. These images are converted into vectors for each corresponding image. Since this is a supervised problem, the X_train, y_train will be the images and the vectors corresponding to the image and the network will again output a vector
This approach works for a single object in an image, but if there are multiple objects in a single image. It will be difficult to determine the dimension output of the neural network.
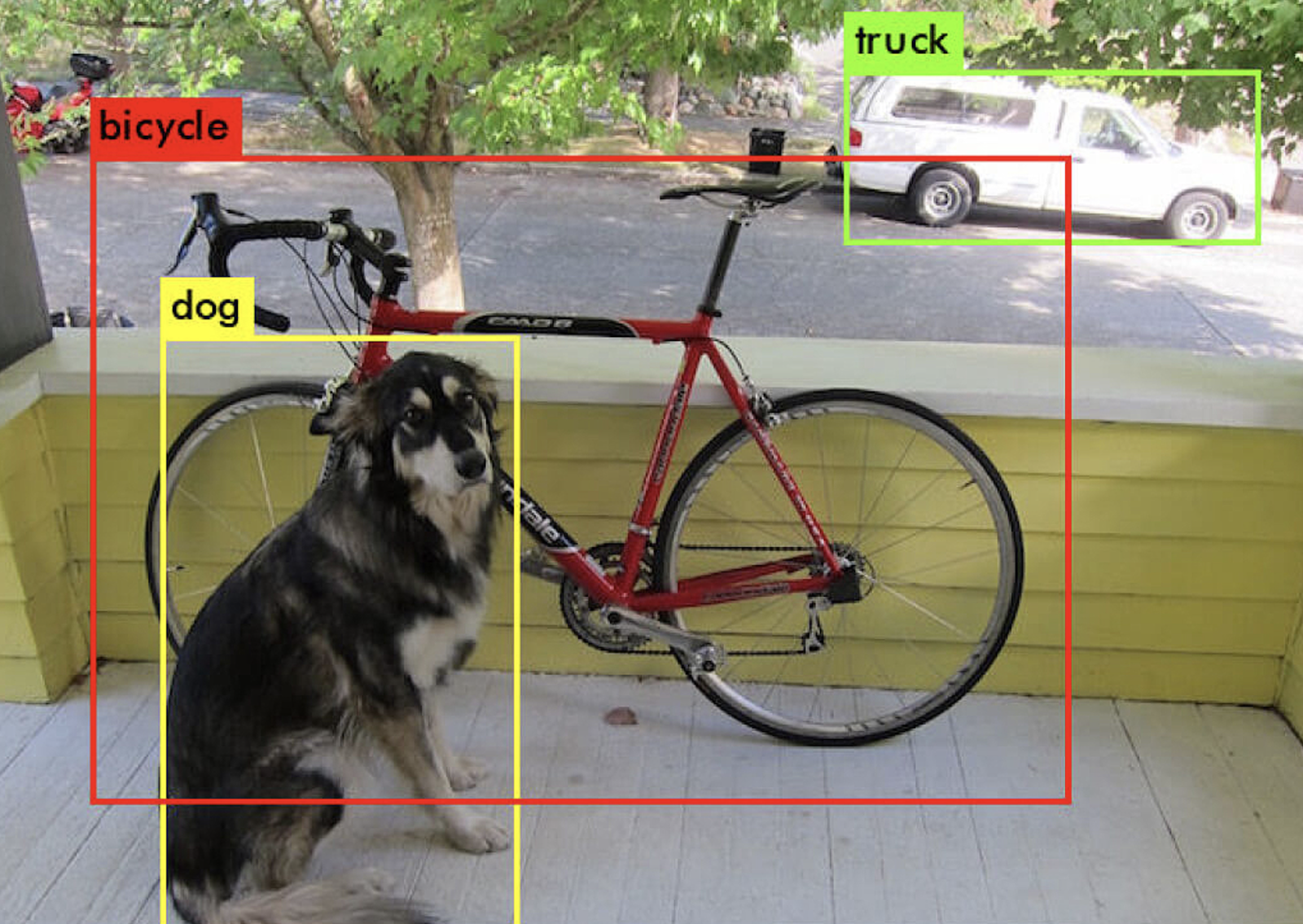
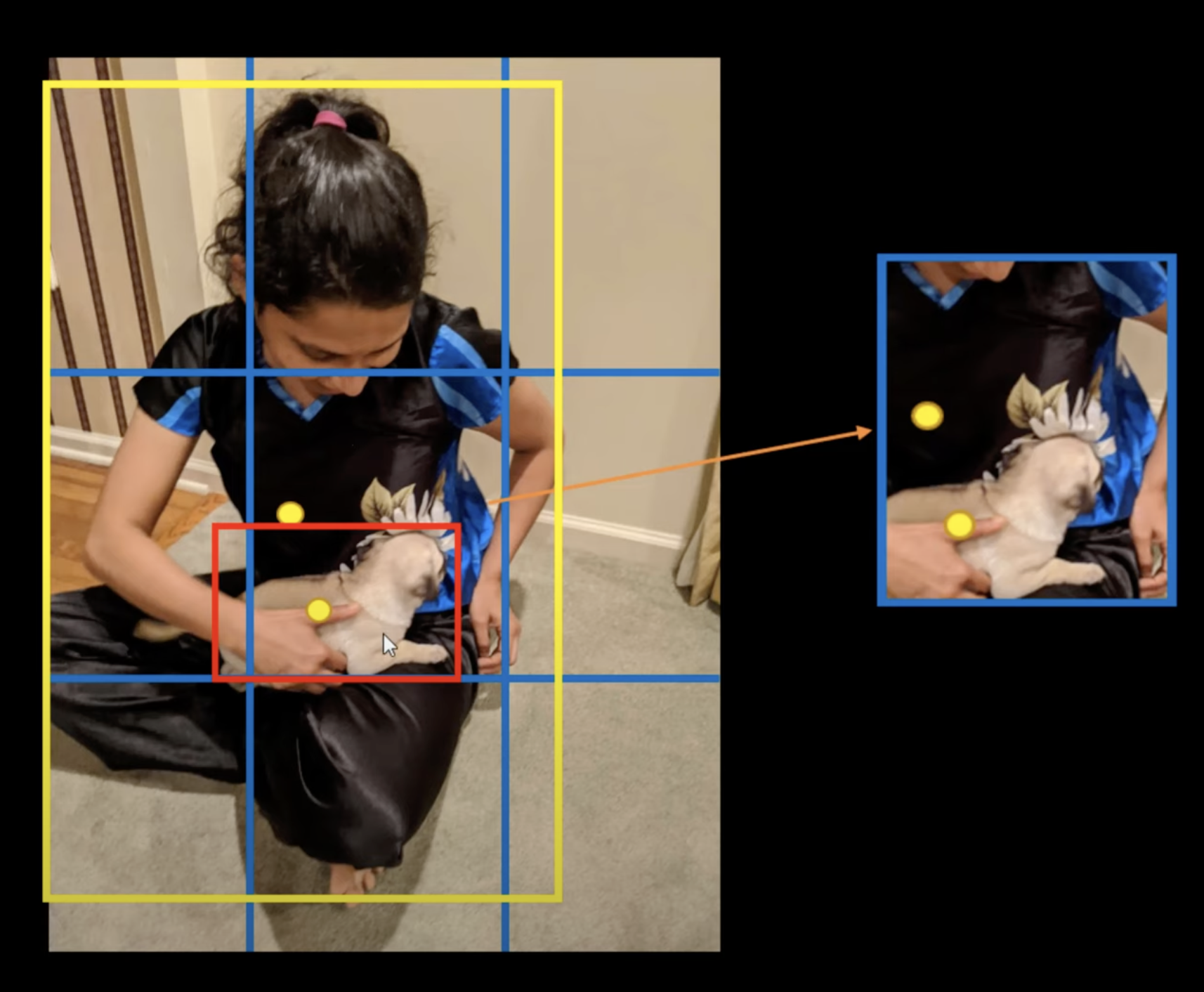
So, in this case where there are multiple objects with multiple bounding boxes in one image. YOLO will divide the image into S x S grid cells.
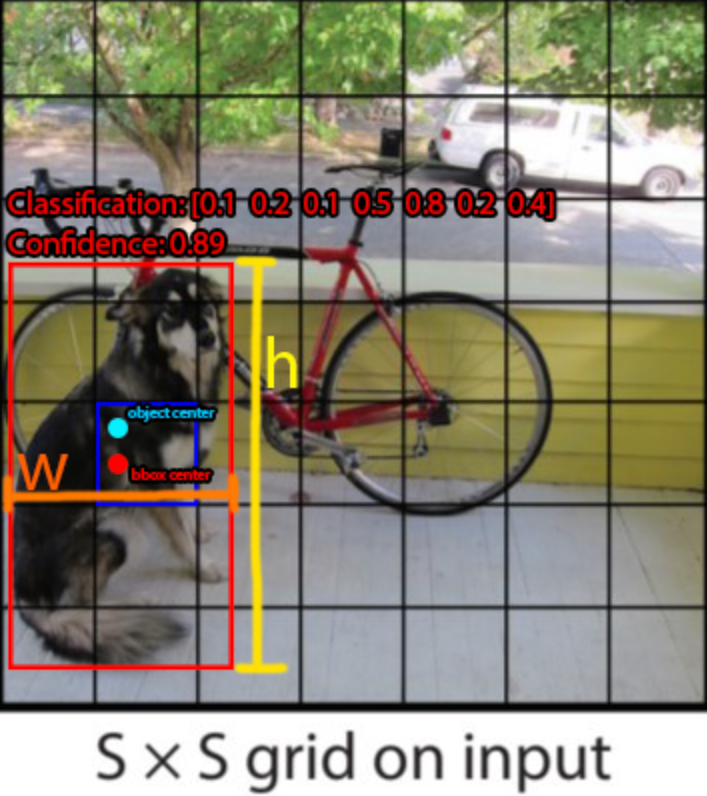
Here, every individual section of the grid is tasked with both predicting and pinpointing the object's class while providing a probability value. These are called Residual blocks.
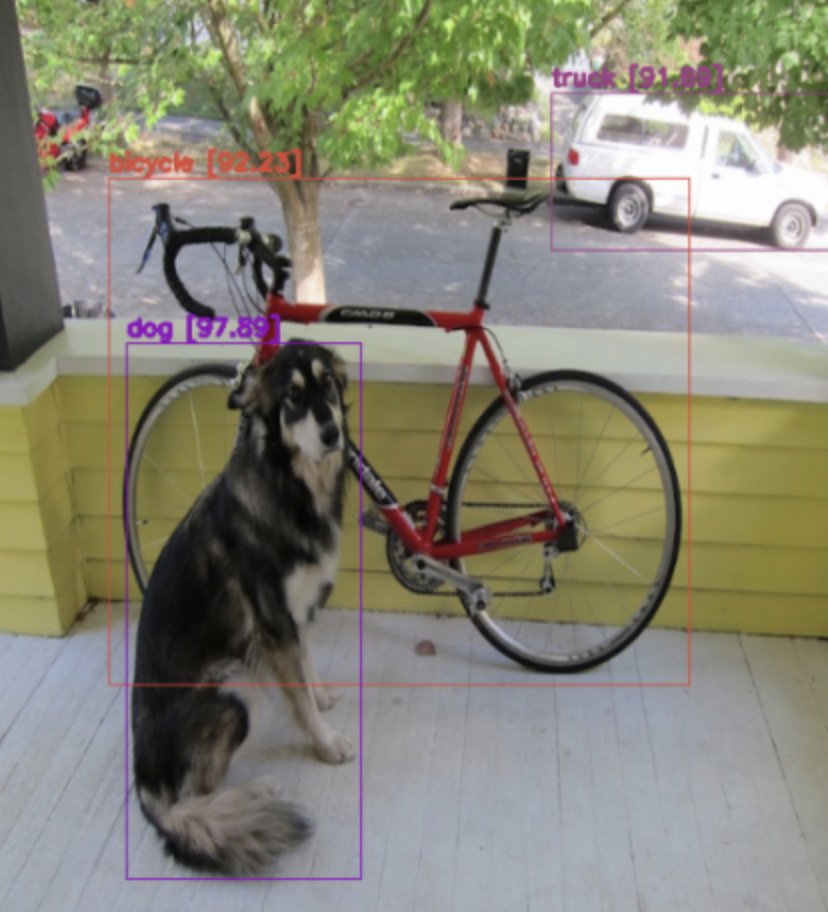
The next step is to find the Bounding box of the objects in the image. These bounding boxes corresponding to each object are the vectors which locate the object as we discussed earlier. The attributes of the vector are n=[Pc, bx,by,bw,bh,c1,c2,c3]. YOLO will generate many of these bounding boxes for each potential object in the image, and later filter these down to those with the highest prediction accuracy.
That means for one image we will get S x S x n. This is because we have an S x S grid of cells, and each cell is a vector of size n. So now, with the image we have the corresponding bounding box or rectangles that we can use as the training data set. Using this now we can train our neural network and generate predictions. This is the basis of the YOLO algorithm. The name YOLO or 'You Only Look Once' is because the algorithm is not iterating over one image.
Even with this methodology, certain adjustments are necessary to enhance the accuracy of predictions. One issue that often comes up is the detection of multiple bounding boxes or rectangles for one given object. Out of all the bounding boxes only one is the relevant one.
To tackle the multiple bounding box issue, the model uses the concept of IOU or Intersections over unions, this value lies in the range of 0 to 1. The main aim of the IOU is to determine the most relevant box out of the multiple boxes.
IoU measures the overlap between a predicted bounding box and a ground truth bounding box. The value is calculated as the ratio of the area of overlap between these two bounding boxes to the total area encompassed by their union.
The formula for calculating IoU is:
IoU=Area of Overlap/Area of UnionIoU
Where:
- Area of Overlap: The region where the predicted bounding box and the ground truth bounding box intersect
- Area of Union: The total area encompassed by both the predicted bounding box and the ground truth bounding box
IoU values range from 0 to 1. A value of 1 indicates perfect overlap between the predicted and ground truth bounding boxes, while a value of 0 means there is no overlap between the two boxes. In the context of object detection, a higher IoU typically signifies better accuracy and precision in localizing objects within images.
The algorithm ignores the predicted value of the grid cell having a low IOU value.
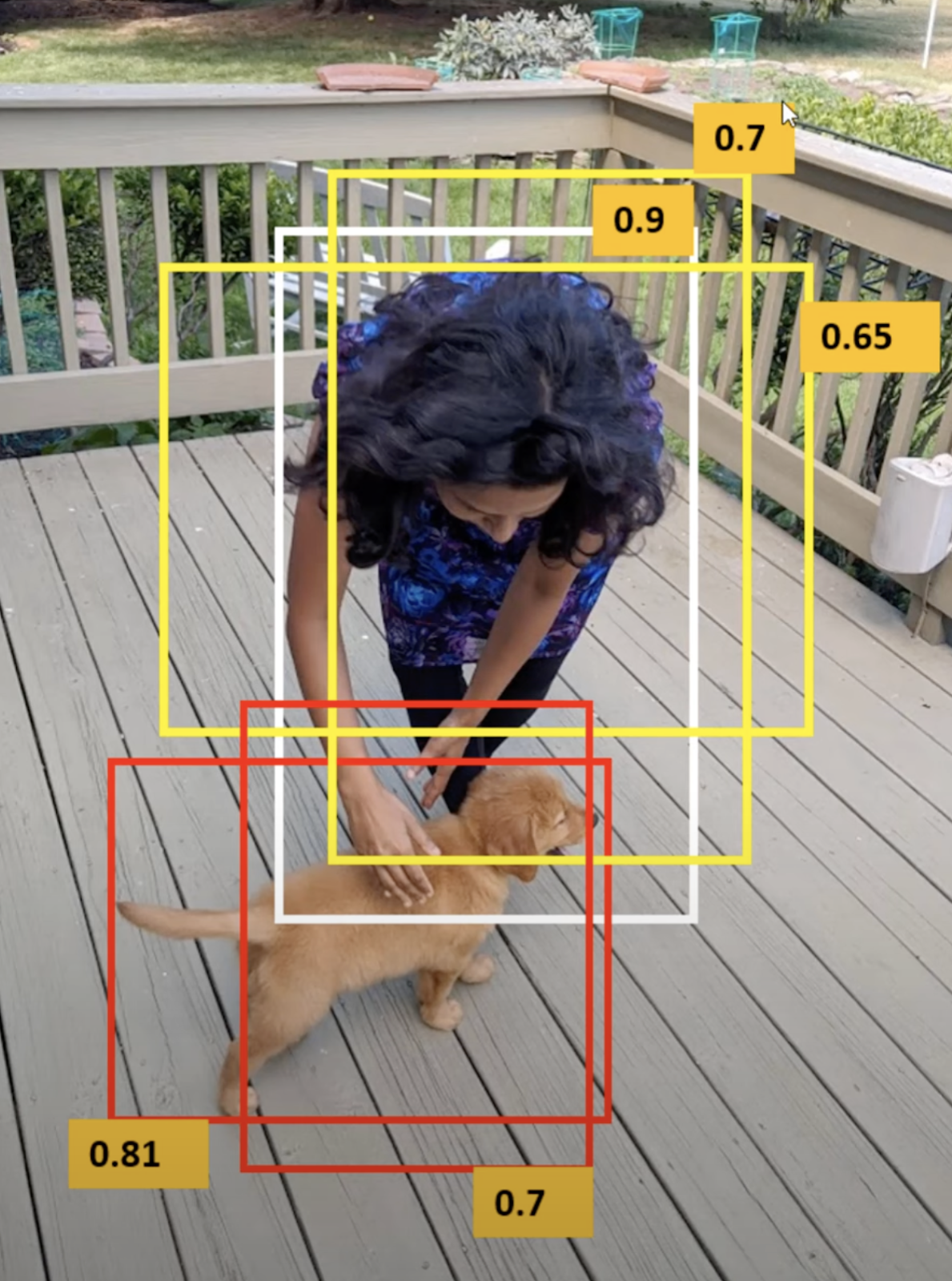
Next, establishing a threshold for IoU alone may not suffice, as an object could potentially be associated with multiple bounding boxes surpassing the threshold value. Retaining all the boxes could introduce unwanted noise. Hence calculating the Non-Maximum Suppression (NMS) becomes crucial, as this allows the model to retain only those object bounding boxes with the highest probabilities.
Now there could be another issue after getting these unique boxes. What if a single cell contains two centers of objects? In this case the grid cell can represent only one class. In such cases Anchor Boxes can resolve the issue.
Anchor boxes represent predetermined bounding boxes with specific dimensions of height and width. These boxes are established to encompass the scale and proportions of particular object classes that one aims to detect, often selected according to the object sizes present within the training datasets.
This covers the basics of the YOLO algorithm. YOLO's strength lies in its ability to detect objects in real-time, but it sometimes still struggles with small objects or closely packed objects in an image due to its single pass approach.
The evolution of YOLO models from YOLOv1 to YOLOv8
Bring this project to life
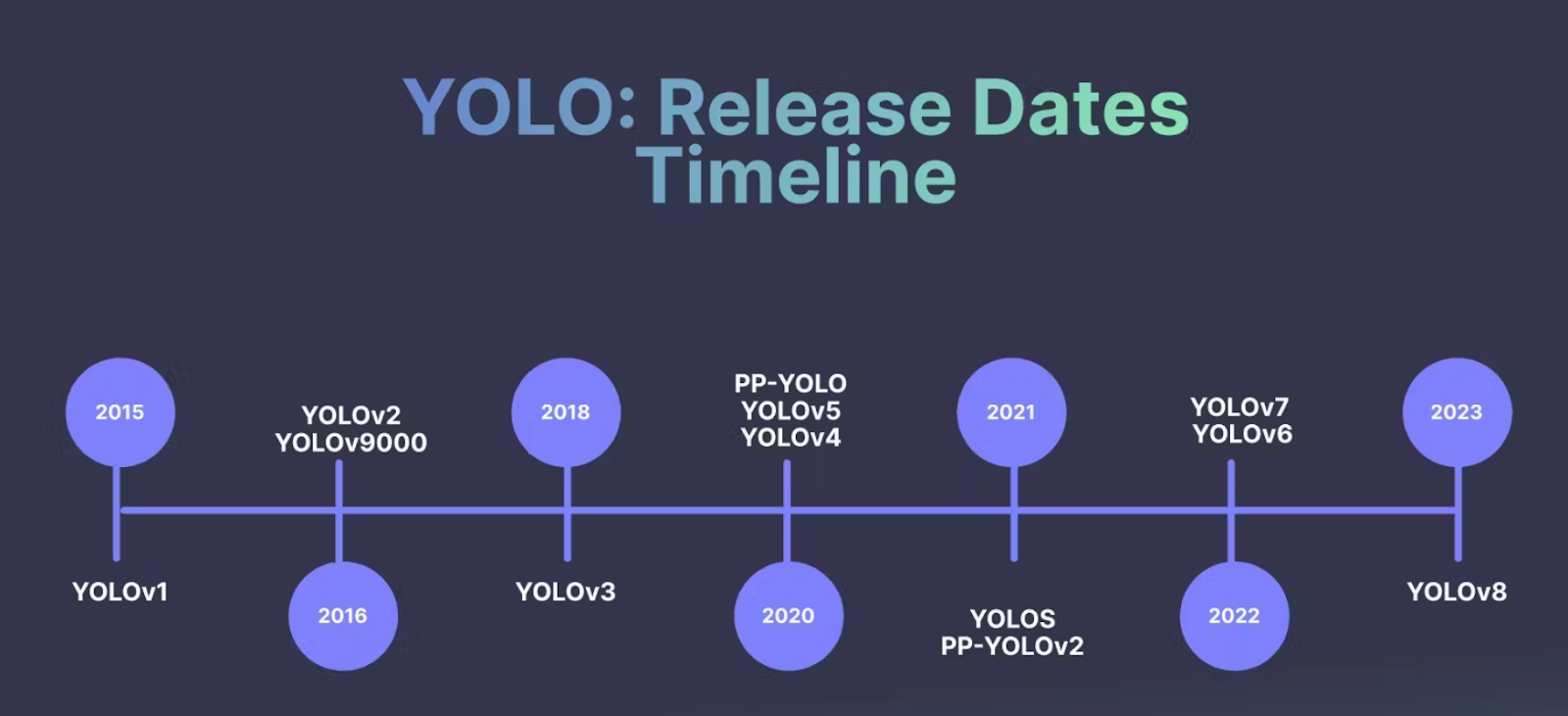
This section provides a brief overview of the YOLO framework’s evolution, from YOLOV1 to YOLOv8. YOLO was introduced in a series of papers by Joseph Redmon and Ali Farhadi and has seen several iterations that have improved its speed, accuracy, and robustness. This SOTA model was a significant development for the computer vision community.
YOLOv1 (2016): The first version of YOLO introduced a groundbreaking approach to object detection by framing it as a regression problem to spatially separated bounding boxes and associated class probabilities. YOLO divided the input image into a grid and predicted bounding boxes and class probabilities directly from the full image in a single pass. This enabled real-time object detection.
YOLOv2 (2016): YOLOv2 brought improvements over the original version by introducing various changes in the architecture. It included batch normalization, high-resolution classifiers, anchor boxes, etc., aiming to enhance both speed and accuracy.
YOLOv3 (2018): In the year 2018, Joseph Redmon and Ali Farhadi published a paper on arXiv called YOLOv3: An Incremental Improvement. YOLOv3 further refined the architecture and training methods. It incorporated the use of feature pyramid networks (FPN) and prediction across different scales to improve detection performance, especially for small objects. YOLOv3 also introduced multiple scales for detection and surpassed the accuracy of previous versions. Please consider checking out the two part blog post on implementing the YOLOv3 object detector from scratch using PyTorch.
YOLOv4 (2020): Alexey Bochkovskiy and others developed a new and improved version of YOLO, YOLOv4: Optimal Speed and Accuracy of Object Detection. YOLOv4 brought significant speed and accuracy improvements over its predecessor. This version focused on improving the network backbone and incorporated various state-of-the-art techniques such as the use of the CSPDarknet53 as the backbone, the Mish activation function, and the introduction of the weighted-Residual-Connections (WRC) as well as other novel approaches to augment performance. However, this was the year Joseph Redmon left computer vision research.
YOLOv5 (2020): In 2020, merely two months after the introduction of YOLOv4, Glenn Jocher, representing Ultralytics, unveiled YOLOv5. This release marked a significant stride in the YOLO series. YOLOv5, while not a direct iteration from the original YOLO creators, was a popular release from the open-source community. It optimized and simplified the architecture and introduced a focus on compatibility, making the model more accessible and easier to implement for various applications. YOLOv5 introduced a more modular and flexible architecture. The primary distinction with YOLOv5 was its development using PyTorch as opposed to DarkNet, the framework utilized in prior YOLO versions.
When tested on the MS COCO dataset test-dev 2017, YOLOv5x showcased an impressive AP of 50.7% using an image size of 640 pixels. With a batch size of 32, it can operate at a speed of 200 FPS on an NVIDIA V100. By opting for a larger input size of 1536 pixels, YOLOv5 can achieve an even greater AP of 55.8%.
Scaled-YOLOv4: In CVPR 2021, the authors of YOLOv4 introduced Scaled-YOLOv4. The primary innovation in Scaled-YOLOv4 involved the incorporation of scaling techniques, where scaling up led to a more precise model at the cost of reduced speed, while scaling down resulted in a faster model with a sacrifice in accuracy. The scaled down architecture was called YOLOv4-tiny and worked well on low-end GPUs. The algorithm ran at 46 FPS on a Jetson TX2 or 440 FPS on RTX2080Ti, achieving 22% mAP on MS COCO. The expanded model architecture known as YOLOv4-large encompassed three varying sizes: P5, P6, and P7. This architecture was specifically tailored for cloud GPU use and attained a cutting-edge performance, surpassing all preceding models by achieving a 56% mean average precision (mAP) on the MS COCO dataset.
YOLOR: YOLOR (You Only Learn One Representation) was developed in the year 2021 by the same research team who developed YOLOv4. A multi-task learning method was devised to create a unified model handling classification, detection, and pose estimation tasks by acquiring a general representation and employing sub-networks for task-specific data. YOLOR, designed akin to how humans utilize prior knowledge for new challenges, underwent assessment on the MS COCO test-dev 2017 dataset, achieving an mAP of 55.4% and mAP50 of 73.3% while maintaining a speed of 30 FPS on an NVIDIA V100.
YOLOX (2021): YOLOX aimed to further improve speed and accuracy. It introduced the concept of Decoupled Head and Backbone (DHBB) and designed a new data augmentation strategy called "Cross-Stage Partial Network (CSPN) Distillation" to enhance performance on small objects.
YOLOv6: Published in the year 2022, by Meituan Vision AI DepartmentYOLOv6: A Single-Stage Object Detection Framework for Industrial Applications YOLOv6-L achieved better accuracy performance (i.e., 49.5%/52.3%) than other detectors with a similar inference speed on an NVIDIA Tesla T4.
Feel free to revisit an earlier Paperspace blogpost that conducted a performance analysis comparing the efficiency of YOLOv6 and YOLOv7 on three commonly used GPU machines available through Paperspace.
YOLOv7 (2022): The same authors of YOLOv4 and YOLOR published YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. YOLOv7 introduces three key elements: E-ELAN for efficient learning, model scaling for adaptability, and a "bag-of-freebies" strategy for accuracy and efficiency. One aspect, re-parametrization, enhances model performance. The latest YOLOv7 model surpassed YOLOv4 by reducing parameters and computation significantly—75% and 36%, respectively—while improving average precision by 1.5%. YOLOv7-tiny also reduced parameters and computation by 39% and 49% without compromising mean average precision (mAP).
DAMO-YOLO (2022): Alibaba Group published a paper titled DAMO-YOLO : A Report on Real-Time Object Detection Design. The document details various methods to enhance real-time video object detection accuracy. A novel detection backbone design derived from Neural Architecture Search (NAS) exploration, an extended neck structure, a more refined head structure, and the integration of distillation technology to enhance performance even further.
These methods involved utilizing MAE-NAS for neural architecture search and implementing Efficient-RepGFPN inspired by GiraffeDet.
YOLOv8(2023): Recently we were introduced to YOLOv8 from the Ultralytics team. A full range of vision AI tasks, including detection, segmentation, pose estimation, tracking, and classification are supported by YOLOv8. This SOTA algorithm has higher mAPs and lower inference speed on the COCO dataset. However, the official paper is yet to be released.
What is new in YOLOv8
YOLOv8 is the latest version of YOLO in the object detection field. Few of the key updates in this versions are:
- A refined network architecture designed for enhanced performance and efficiency
- Revised Anchor boxes design: Anchor boxes have been restructured to optimize the detection of object scales and aspect ratios within specific classes. These predefined bounding boxes are tailored to the sizes and variations of objects in training datasets, ensuring more accurate object localization and recognition in object detection models
- Adjusted loss function to improve overall accuracy in the predictions
- YOLOv8 integrates an adapted CSPDarknet53 backbone alongside a self-attention mechanism situated in the network's head
Architecture overview of YOLOv8
The actual paper is still to be released, hence there is not much information about the architecture of the model. However, we will still try to get an overview of the model. The layout shown in the image was made by RangeKing on GitHub and is a great way of visualizing the architecture.
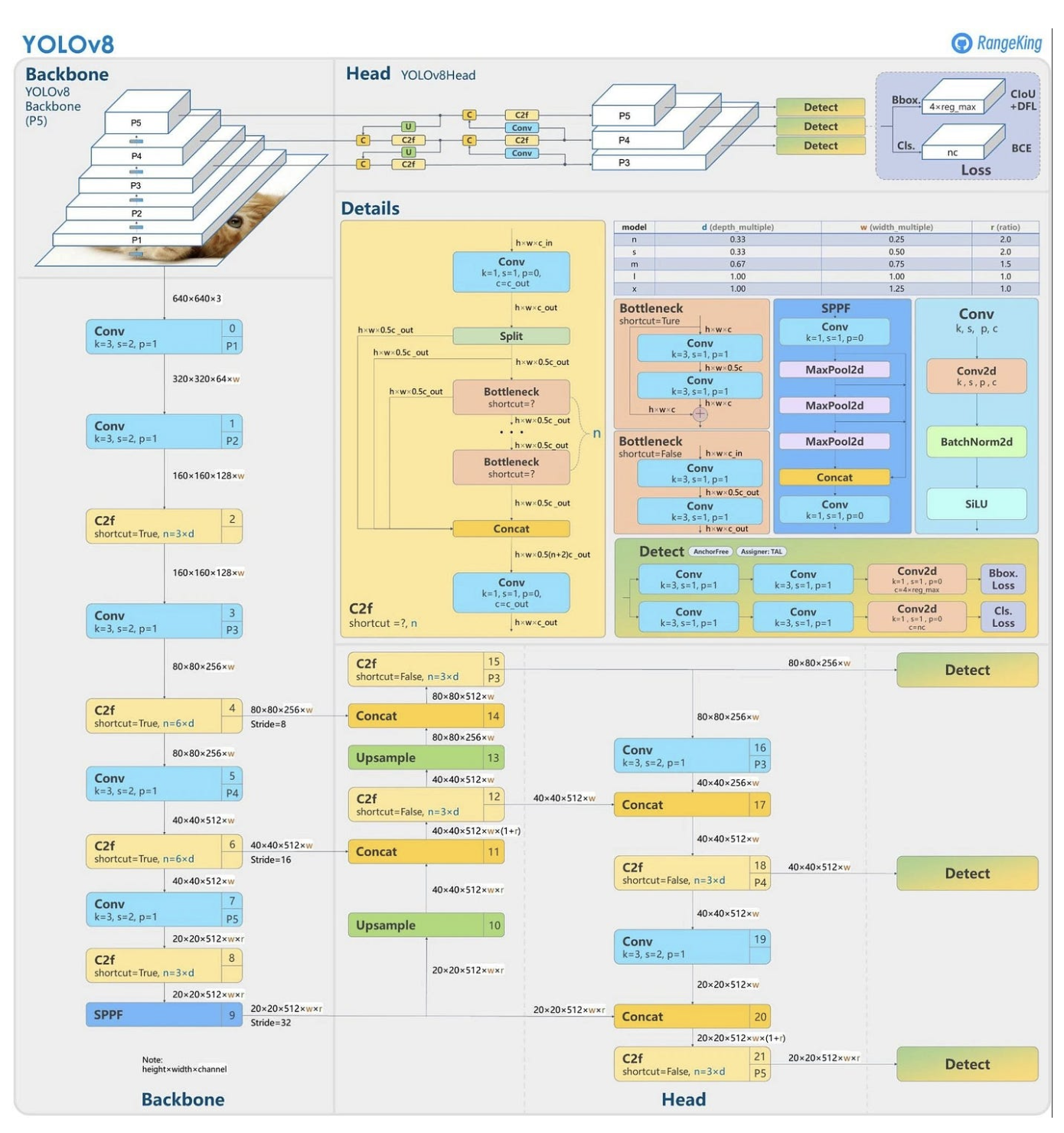
The major changes in the layout are:
- New convolutions in YOLOv8
- Anchor-free Detections
- Mosaic Augmentation
For a more comprehensive explanation, we recommend referring to the earlier post on Paperspace, where the intricate details of the YOLOv8 architecture are thoroughly explained.
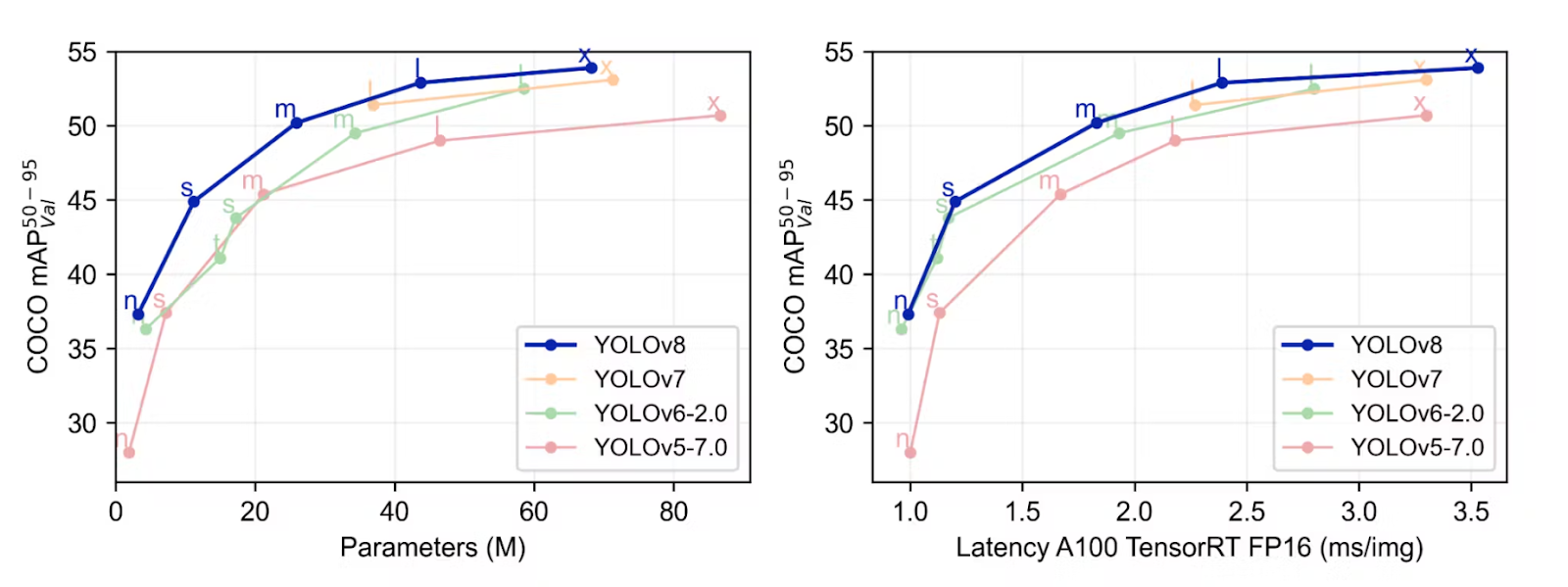
Benchmark Results Across YOLO lineage
Once more, the Ultralytics team has conducted benchmarking of YOLOv8 using the COCO dataset, revealing notable advancements compared to prior YOLO iterations across all five model sizes. The below figure represents the comparison of YOLOv8 with the previous YOLO series.
Metrics, as mentioned in these sections, were used to understand the model efficiency.
- Performance (mAP)
- Speed of the inference (In fps)
- Compute or the model size in FLOPs and params
YOLOv8 accommodates various computer vision tasks, enabling the execution of object detection, image segmentation, object classification, and pose estimation. Each task serves a distinct purpose and caters to different objectives and use cases. Here are benchmarking results of 5 YOLOv8 models.
Detection
Object detection is the task that involves identifying the location and class of objects in an image or video stream.
In the comparison of object detection across five different model sizes, the YOLOv8m model obtained a mean Average Precision (mAP) of 50.2% on the COCO dataset. Meanwhile, the YOLOv8x, the largest model among the set, achieved 53.9% mAP, despite having more than twice the number of parameters.
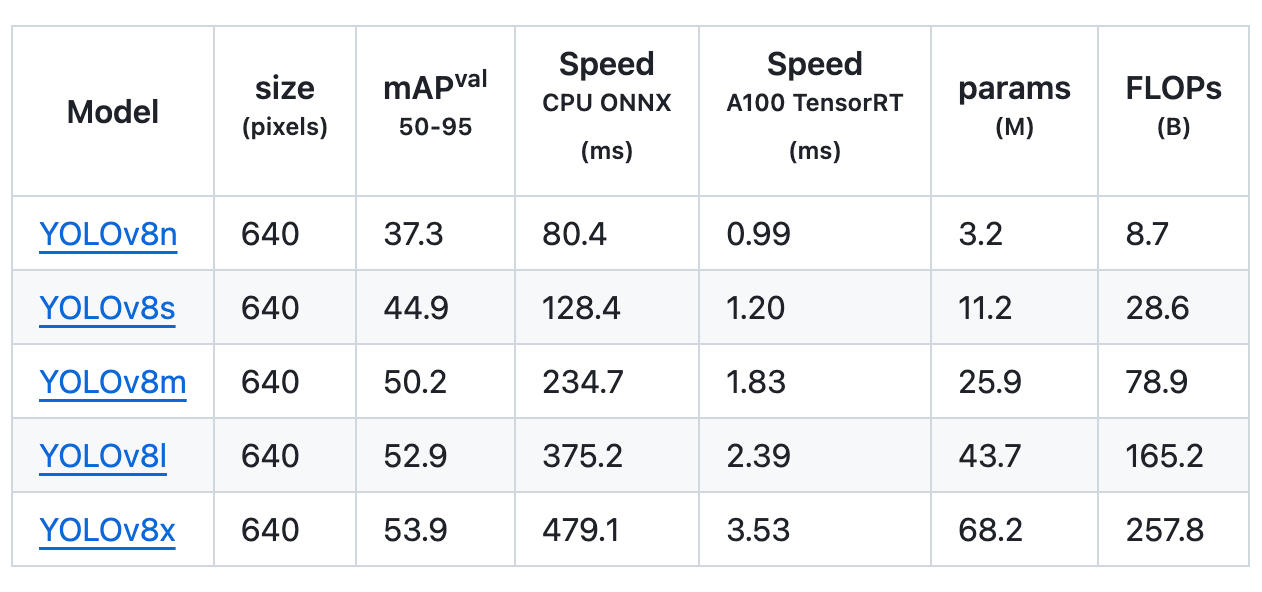
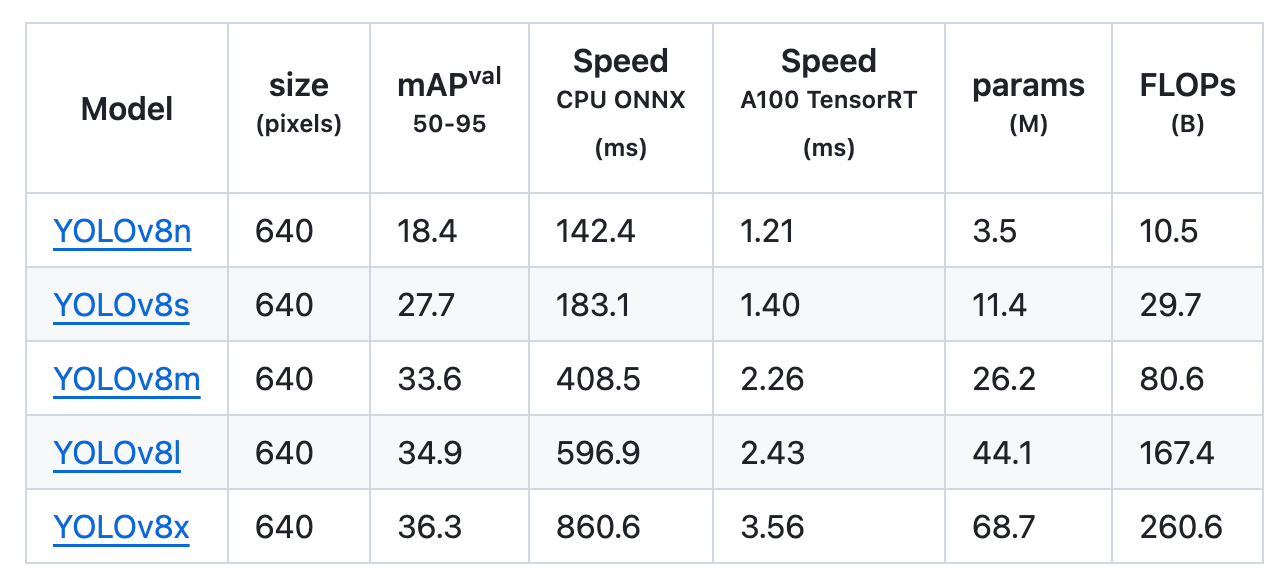
While using the Open Image v7 dataset, the YOLOv8x model obtained a mAP of 36.3% with almost the same number of parameters.
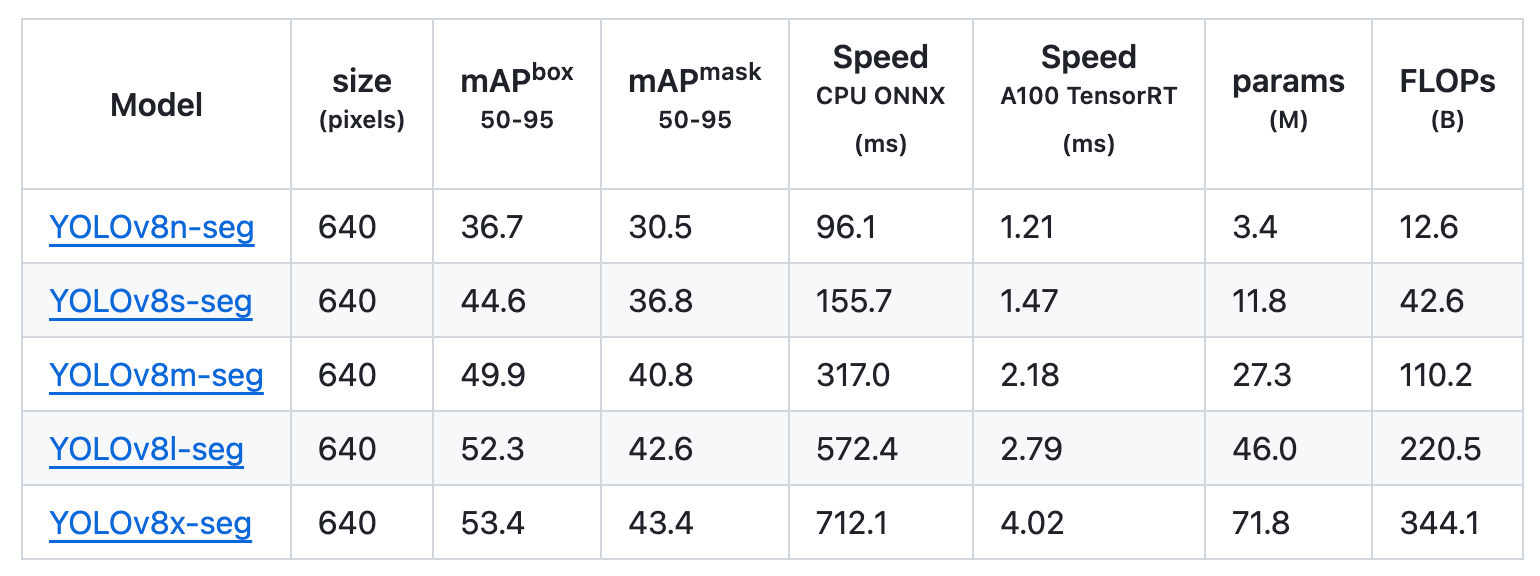
Segmentation
Instance segmentation in object detection involves identifying individual objects in an image and segments them from the rest of the image.
For object segmentation, these models were trained on COCO-Seg, which included 80 pre-trained classes.
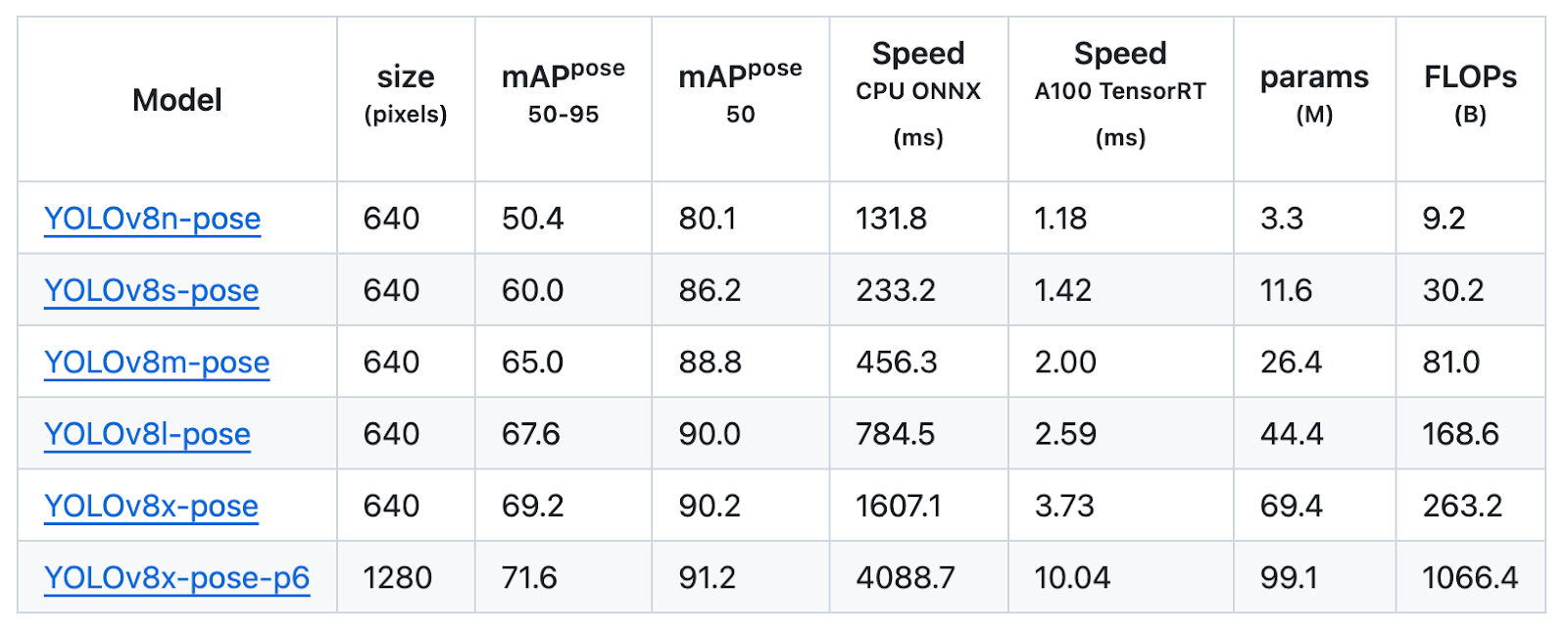
Pose
Pose estimation is the process of identifying key points within an image, commonly known as keypoints, which determines their specific locations.
These models trained on COCO-Pose, included 1 pre-trained class, person.
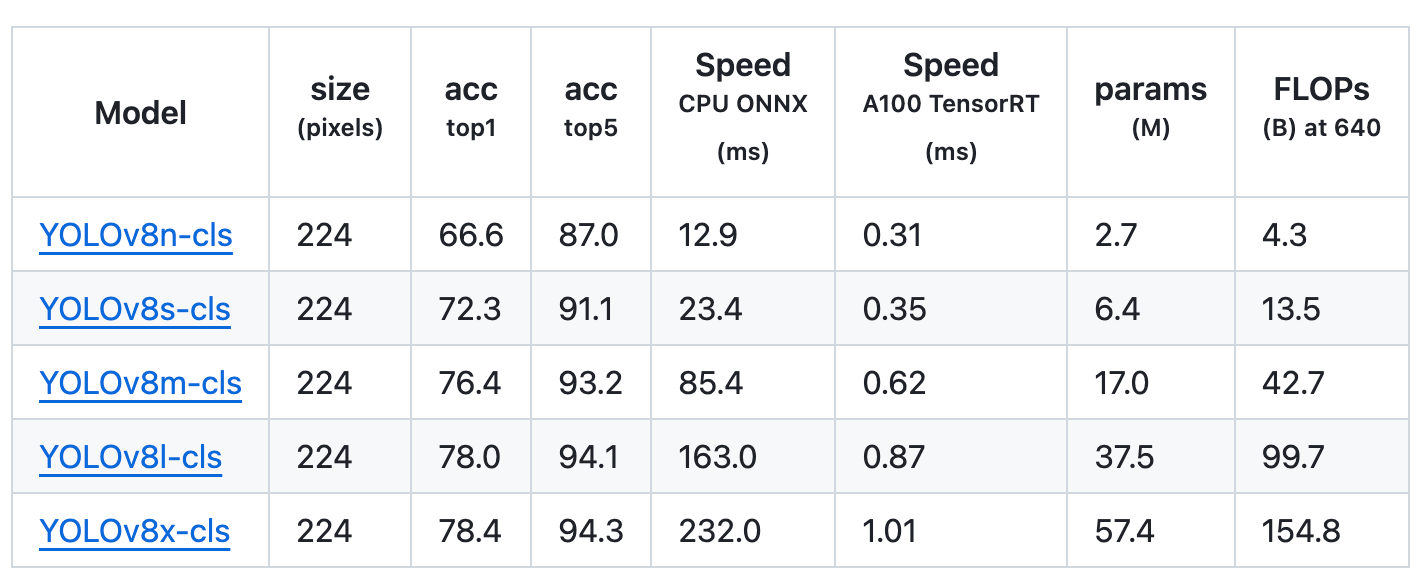
Classification
Classification is the simplest of the other tasks and involves classifying an entire image into one of a set of predefined classes. An image classifier produces a singular class label accompanied by a confidence score.
These models were trained on ImageNet, which included 1000 pre-trained classes.
Due to its exceptional accuracy and performance, YOLOv8 emerges as a robust candidate for your upcoming computer vision project.
Code Demo
Bring this project to life
In this article we will walkthrough the steps to implement YOLOv8 on the Paperspace platform. To implement YOLOv8 on Paperspace using a GPU, please follow the step-by-step process. Alternatively, click on the provided link to apply YOLOv8 on the Paperspace platform. YOLOv8 is highly efficient and can be accelerated significantly by utilizing the computational power of a GPU. The YOLOv8n model can easily be trained on a Free GPU.
Paperspace offers various GPU options suitable for deep learning tasks, including NVIDIA GPUs. Here’s a general guide on how you might implement YOLO using Paperspace:
- Installing ultralytics to work with yolov8 and import the necessary libraries
!pip install ultralytics#Import necessary Libraries
from PIL import Image
import cv2
from roboflow import Roboflow
from ultralytics import YOLO
from PIL import ImageConstructing a personalized dataset can be a tedious task, demanding numerous hours to gather images, annotate them accurately, and ensure they are exported in the appropriate format. Fortunately, Roboflow simplifies this process significantly.
We will utilize the Hard Hat Image Dataset provided by Roboflow for the purpose of identifying the presence of hard hats worn by construction site workers.
- Install roboflow to export the dataset
!pip install roboflow- Export Dataset
We will train the YOLOv8 on Hard Hat Image Dataset from Roboflow.
To access a dataset from Roboflow Universe, we will use our pip package. With Roboflow we have the option to generate the suitable code snippet directly within our user interface. When on a dataset’s Universe home page, simply click the "Export this Dataset" button, then select the YOLO v8 export format.
This will generate a code snippet similar to the code provided below, copy and paste the code to the Paperspace notebook or a similar environment. Execute the code, the dataset will be downloaded in the appropriate format.
from roboflow import Roboflow
rf = Roboflow(api_key="ObZiCCFfi6a0GjBMxXZi")
project = rf.workspace("shaoni-mukherjee-umnyu").project("hard-hat-sample-ps3xv")
dataset = project.version(2).download("yolov8")Once the is successfully run please refresh the files section and we can find the data set folder with the necessary files and folder.
- Model train
Go to the downloaded directory and access the data.yaml file. Ensure to modify the paths of the training, testing, and validation folders to accurately reflect their respective folder locations.
names:
- head
- helmet
- person
nc: 3
roboflow:
license: Public Domain
project: hard-hat-sample-ps3xv
url: https://app.roboflow.com/shaoni-mukherjee-umnyu/hard-hat-sample-ps3xv/2
version: 2
workspace: shaoni-mukherjee-umnyu
test: /notebooks/Hard-Hat-Sample-2/test/images
train: /notebooks/Hard-Hat-Sample-2/train/images
val: /notebooks/Hard-Hat-Sample-2/valid/imagesThe below steps loads the model and begin the training process
# Load a model
model = YOLO("yolov8n.yaml") # build a new model from scratch
model = YOLO("yolov8n.pt") # load a pretrained model (recommended for training)
# Use the model
results = model.train(data="Hard-Hat-Sample-2/data.yaml", epochs=20) # train the model
results = model.val() # evaluate model performance on the validation set- Evaluate model performance on test image from web
from PIL import Image
import cv2
# from PIL
# Predict with the model
results = model('https://safetyculture.com/wp-content/media/2022/02/Construction.jpeg')- View the results
The below code will display the coordinates of the bounding boxes
# View results
for r in results:
print(r.boxes)- Evaluate the results
Analyze the performance of the model on various test images to ensure it is detecting objects accurately
# Show the results
for r in results:
im_array = r.plot() # plot a BGR numpy array of predictions
im = Image.fromarray(im_array[..., ::-1]) # RGB PIL image
im.show() # show image
im.save('results.jpg') 
As we can see that the model has able to detect objects very clearly. Feel free to evaluate the model on different images.
Advantages of YOLOv8
- The most recent version of the YOLO object detection model, known as YOLOv8, focuses on enhancing accuracy and efficiency compared to its predecessors. It incorporates advancements such as a refined network architecture, redesigned anchor boxes, and an updated loss function to improve accuracy
- The model has achieved better accuracy than its previous versions
- YOLOv8 can be successfully installed and runs efficiently in any standard hardware. The latest YOLOv8 implementation comes with a lot of new features, especially the user-friendly CLI and GitHub repo
- The advantage of Anchor-free detection offers the enhanced flexibility and efficiency by eliminating the need for manually specifying anchor boxes. This omission is beneficial as the selection of anchor boxes can be challenging and might result in suboptimal outcomes in earlier YOLO models like v1 and v2
- Custom datasets can be used to refine YOLOv8, enhancing its accuracy for particular object detection assignments
- Also, the codebase is open source with detailed documentation from Ultralytics
- To work with YOLOv8 the requirements are, a computer equipped with a GPU, deep learning frameworks (like PyTorch or TensorFlow), and access to the YOLOv8 repository on GitHub. Paperspace's wide range of GPU-based cloud computing resources that can be utilized to train, fine-tune, and run YOLO models, one can take advantage of the parallel processing power of the GPU to expedite object detection processes. Also Paperspace platform comes with installed Pytorch and Tensorflow
Conclusion
This blog post delved into the advancements of YOLOv8, the most recent iteration of the YOLO algorithm, which has brought about a significant transformation in object detection techniques.
We also explained the building blocks of YOLO, and what makes the algorithm a breakthrough algorithm in computer vision. Also, we emphasized the significant attributes and benchmarking of different YOLOv8 versions. Along with this we also understood the YOLO evolution briefly and how with each version there is significant improvement.
We further implemented YOLOv8 on a custom dataset using Roboflow Hard Hat object detection Image Dataset and Paperspace platform.
Ultimately, we outlined a range of potential uses for YOLOv8, spanning autonomous vehicles, surveillance, retail, medical imaging, agriculture, and robotics. YOLOv8 stands as a potent and adaptable object detection algorithm, showcasing its ability to accurately and rapidly detect and categorize objects across diverse real-world applications.
Please be sure to test out this tutorial! Thank you for reading.
Bring this project to life
References
- Model Train Ultralytics
- Roboflow Datasets
- YOLO detailed Paperspace blogpost
- Real-Time Flying Object Detection with YOLOv8
- Ultralytics detailed document on YOLOv8
- A Gentle Introduction to YOLOv8