Image Credits: cryptocurrency360.com
Hello there. This is Part 4 of our PyTorch 101 series and we will cover multiple GPU usage in this post.
In this part we will cover,
- How to use multiple GPUs for your network, either using data parallelism or model parallelism.
- How to automate selection of GPU while creating a new objects.
- How to diagnose and analyse memory issues should they arise.
So, let's get started.
Before we begin, let me remind you this part 4 of our PyTorch series.
- Understanding Graphs, Automatic Differentiation and Autograd
- Building Your First Neural Network
- Going Deep with PyTorch
- Memory Management and Using Multiple GPUs
- Understanding Hooks
You can get all the code in this post, (and other posts as well) in the Github repo here.
Moving tensors around CPU / GPUs
Every Tensor in PyTorch has a to() member function. It's job is to put the tensor on which it's called to a certain device whether it be the CPU or a certain GPU. Input to the to function is a torch.device object which can initialised with either of the following inputs.
cpufor CPUcuda:0for putting it on GPU number 0. Similarly, if you want to put the tensors on
Generally, whenever you initialise a Tensor, it's put on the CPU. You can move it to the GPU then. You can check whether a GPU is available or not by invoking the torch.cuda.is_available function.
if torch.cuda.is_available():
dev = "cuda:0"
else:
dev = "cpu"
device = torch.device(dev)
a = torch.zeros(4,3)
a = a.to(device) #alternatively, a.to(0)You can also move a tensor to a certain GPU by giving it's index as the argument to to function.
Importantly, the above piece of code is device agnostic, that is, you don't have to separately change it for it to work on both GPU and the CPU.
cuda() function
Another way to put tensors on GPUs is to call cuda(n) function on them where n is the index of the GPU. If you just call cuda, then the tensor is placed on GPU 0.
The torch.nn.Module class also has to adnd cuda functions which puts the entire network on a particular device. Unlike, Tensors calling to on the nn.Module object is enough, and there's no need to assign the returned value from the to function.
clf = myNetwork()
clf.to(torch.device("cuda:0") # or clf = clf.cuda() Automatic selection of GPU
While it's good to be able to explicitly decide on which GPU does a tensor go, generally, we create a lot of tensors during our operations. We want them to be automatically created on a certain device, so as to reduce cross device transfers which can slow our code down. In this regard, PyTorch provides us with some functionality to accomplish this.
First, is the torch.get_device function. It's only supported for GPU tensors. It returns us the index of the GPU on which the tensor resides. We can use this function to determine the device of the tensor, so that we can move a created tensor automatically to this device.
#making sure t2 is on the same device as t2
a = t1.get_device()
b = torch.tensor(a.shape).to(dev)We can also call cuda(n) while creating new Tensors. By default all tensors created by cuda call are put on GPU 0, but this can be changed by the following statement.
torch.cuda.set_device(0) # or 1,2,3
If a tensor is created as a result of an operation between two operands which are on same device, so will be the resultant tensor. If operands are on different devices, it will lead to an error.
new_* functions
One can also make use of the bunch of new_ functions that made their way to PyTorch in version 1.0. When a function like new_ones is called on a Tensor it returns a new tensor cof same data type, and on the same device as the tensor on which the new_ones function was invoked.
ones = torch.ones((2,)).cuda(0)
# Create a tensor of ones of size (3,4) on same device as of "ones"
newOnes = ones.new_ones((3,4))
randTensor = torch.randn(2,4)
A detailed list of new_ functions can be found in PyTorch docs the link of which I have provided below.
Using Multiple GPUs
There are two ways how we could make use of multiple GPUs.
- Data Parallelism, where we divide batches into smaller batches, and process these smaller batches in parallel on multiple GPU.
- Model Parallelism, where we break the neural network into smaller sub networks and then execute these sub networks on different GPUs.
Data Parallelism
Data Parallelism in PyTorch is achieved through the nn.DataParallel class. You initialize a nn.DataParallel object with a nn.Module object representing your network, and a list of GPU IDs, across which the batches have to be parallelised.
parallel_net = nn.DataParallel(myNet, gpu_ids = [0,1,2])
Now, you can simply execute the nn.DataParallel object just like a nn.Module .
predictions = parallel_net(inputs) # Forward pass on multi-GPUs
loss = loss_function(predictions, labels) # Compute loss function
loss.mean().backward() # Average GPU-losses + backward pass
optimizer.step() However, there are a few things I want to shed light over. Despite the fact our data has to be parallelised over multiple GPUs, we have to initially store it on a single GPU.
We also need to make sure the DataParallel object is on that particular GPU as well. The syntax remains similar to what we did earlier with nn.Module.
input = input.to(0)
parallel_net = parellel_net.to(0)In effect, the following diagram describes how nn.DataParallel works.
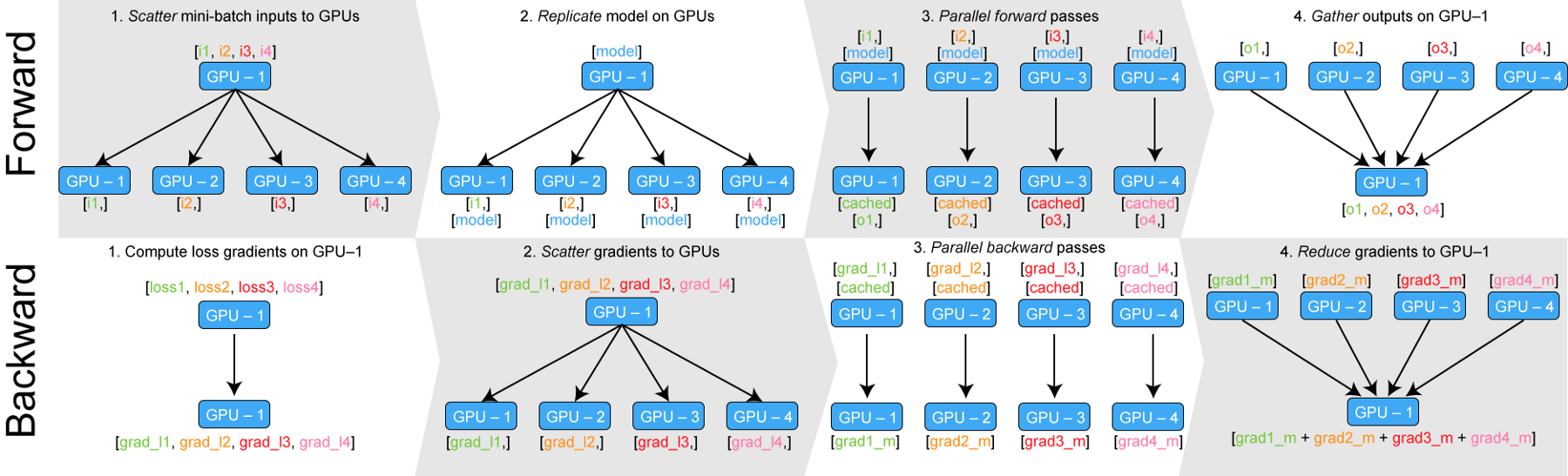
DataParallel takes the input, splits it into smaller batches, replicates the neural network across all the devices, executes the pass and then collects the output back on the original GPU.
One issue with DataParallel can be that it can put asymmetrical load on one GPU (the main node). There are generally two ways to circumvent these problem.
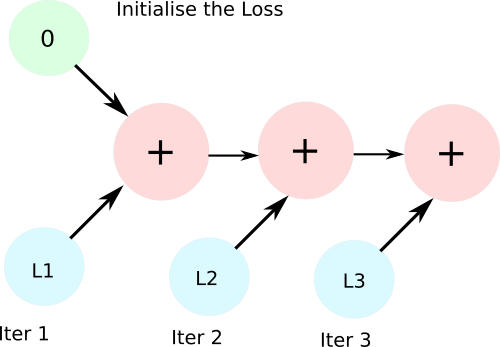
- First, is to compute the loss during the forward pass. This makes sure at least the loss calculation phase is parallelised.
- Another way is to implement a parallel loss function layer. This is beyond the scope of this article. However, for those interested I have given a link to a medium article detailing implementation of such a layer at the end of this article.
Model Parallelism
Model parallelism means that you break your network into smaller subnetworks that you then put on different GPUs. The main motivation for doing such a thing is that your network might be too large to fit inside a single GPU.
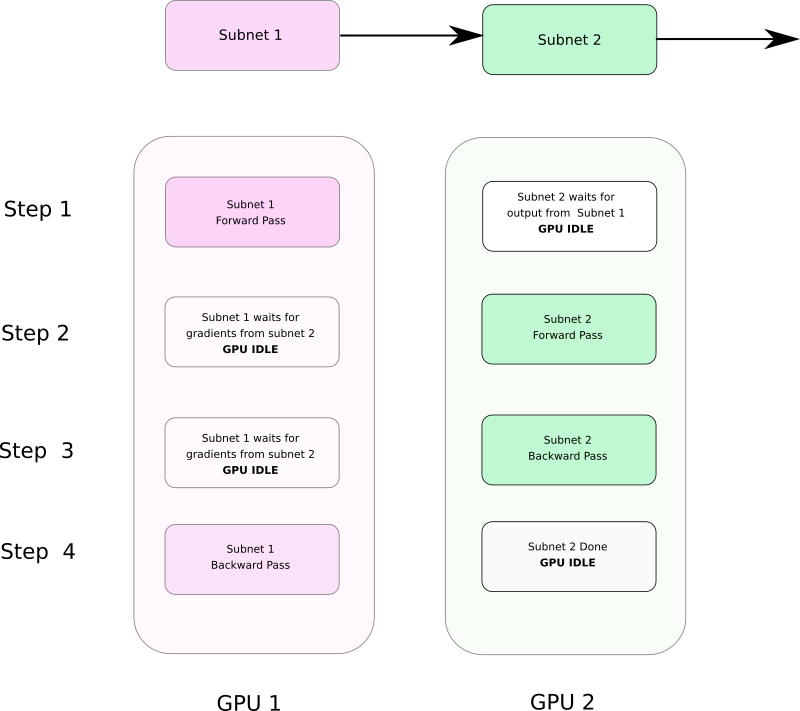
Note that model parallelism is often slower than data parallelism as splitting a single network into multiple GPUs introduces dependencies between GPUs which prevents them from running in a truly parallel way. The advantage one derives out of model parallelism is not about speed, but ability to run networks whose size is too large to fit on a single GPU.
As we see in figure b, Subnet 2 waits for Subnet 1 during forward pass, while Subnet 1 waits for Subnet 2 during backward pass.
Implementing Model parallelism is PyTorch is pretty easy as long as you remember 2 things.
- The input and the network should always be on the same device.
toandcudafunctions have autograd support, so your gradients can be copied from one GPU to another during backward pass.
We will use the following piece of code to understand this better.
class model_parallel(nn.Module):
def __init__(self):
super().__init__()
self.sub_network1 = ...
self.sub_network2 = ...
self.sub_network1.cuda(0)
self.sub_network2.cuda(1)
def forward(x):
x = x.cuda(0)
x = self.sub_network1(x)
x = x.cuda(1)
x = self.sub_network2(x)
return x
In the init function we have put the sub-networks on GPUs 0 and 1 respectively.
Notice in the forward function, we transfer the intermediate output from sub_network1 to GPU 1 before feeding it to sub_network2. Since cuda has autograd support, the loss backpropagated from sub_network2 will be copied to buffers of sub_network1 for further backpropagation.
Troubleshooting Out of Memory Errors
In this section we will cover how to diagnose memory issues and possible solutions if your network is using more memory than it is needed.
While going out of memory may necessitate reducing batch size, one can do certain check to ensure that usage of memory is optimal.
Tracking Memory Usage with GPUtil
One way to track GPU usage is by monitoring memory usage in a console with nvidia-smi command. The problem with this approach is that peak GPU usage, and out of memory happens so fast that you can't quite pinpoint which part of your code is causing the memory overflow.
For this we will use an extension called GPUtil, which you can install with pip by running the following command.
pip install GPUtilThe usage is pretty simple too.
import GPUtil
GPUtil.showUtilization()Just put the second line wherever you want to see the GPU Utilisation. By placing this statement at different places in the code you can figure out what part is exactly causing the the network to go OOM.
Let us now talk about possible methods for remedying OOM errors.
Dealing with Memory Losses using del keyword
PyTorch has a pretty aggressive garbage collector. As soon as a variable goes out of scope, the garbage collection will free it.
It is to be kept in mind that Python doesn't enforce scoping rules as strongly as other languages such as C/C++. A variable is only freed when there exists no pointers to it. (This has to do with the fact that variables needn't be declared in Python)
As a result, memory occupied by tensos holding your input, output tensors can still not be freed even once you are out of training loop. Consider the following chunk of code.
for x in range(10):
i = x
print(i) # 9 is printedRunning the above snippet of code will print values of i even when we are outside are the loop where we initialised i. Similarly, tensors holding loss and output can live beyond the training loop. In order to truly free up the space held by these tensors, we use del keyword.
del out, lossIn fact, as a general rule of thumb, if you are done with a tensor, you should del as it won't be garbage collected unless there is no reference to it left.
Using Python Data Types Instead Of 1-D Tensors
Often, we aggregate values in our training loop to compute some metrics. Biggest example of this is that we update the running loss each iteration. However, if not done carefully in PyTorch, such a thing can lead to excess use of memory than what is required.
Consider the following snippet of code.
total_loss = 0
for x in range(10):
# assume loss is computed
iter_loss = torch.randn(3,4).mean()
iter_loss.requires_grad = True # losses are supposed to differentiable
total_loss += iter_loss # use total_loss += iter_loss.item) insteadWe expect that in the subsequent iterations, the reference to iter_loss is reassigned to new iter_loss, and the object representing iter_loss from earlier representation will be freed. But this doesn't happen. Why?
Since iter_loss is differentiable, the line total_loss += iter_loss creates a computation graph with one AddBackward function node. During subsequent iterations, AddBackward nodes are added to this graph and no object holding values of iter_loss is freed. Normally, the memory allocated to a computation graph is freed when backward is called upon it, but here, there's no scope of calling backward.
lossThe solution to this is to add a python data type, and not a tensor to total_loss which prevents creation of any computation graph.
We merely replace the line total_loss += iter_loss with total_loss += iter_loss.item(). item returns the python data type from a tensor containing single values.
Emptying Cuda Cache
While PyTorch aggressively frees up memory, a pytorch process may not give back the memory back to the OS even after you del your tensors. This memory is cached so that it can be quickly allocated to new tensors being allocated without requesting the OS new extra memory.
This can be a problem when you are using more than two processes in your workflow.
The first process can hold onto the GPU memory even if it's work is done causing OOM when the second process is launched. To remedy this, you can write the command at the end of your code.
torch.cuda.empy_cache()This will make sure that the space held by the process is released.
import torch
from GPUtil import showUtilization as gpu_usage
print("Initial GPU Usage")
gpu_usage()
tensorList = []
for x in range(10):
tensorList.append(torch.randn(10000000,10).cuda()) # reduce the size of tensor if you are getting OOM
print("GPU Usage after allcoating a bunch of Tensors")
gpu_usage()
del tensorList
print("GPU Usage after deleting the Tensors")
gpu_usage()
print("GPU Usage after emptying the cache")
torch.cuda.empty_cache()
gpu_usage()The following output is produced when this code is executed on a Tesla K80
Initial GPU Usage
| ID | GPU | MEM |
------------------
| 0 | 0% | 5% |
GPU Usage after allcoating a bunch of Tensors
| ID | GPU | MEM |
------------------
| 0 | 3% | 30% |
GPU Usage after deleting the Tensors
| ID | GPU | MEM |
------------------
| 0 | 3% | 30% |
GPU Usage after emptying the cache
| ID | GPU | MEM |
------------------
| 0 | 3% | 5% |Using torch.no_grad() for Inference
PyTorch, by default, will create a computational graph during the forward pass. During creation of this graph, it will allocate buffers to store gradients and intermediate values which are used for computing the gradient during the backward pass.
During the backward pass, all of these buffers, with the exception of those allocated for leaf variables are freed.
However, during inference, there is no backward pass and these buffers are never freed, leading up to piling up of memory. Therefore, whenever you want to execute a piece of code that doesn't need to be backpropagated, put it inside a torch.no_grad() context manager.
with torch.no_grad()
# your code Using CuDNN Backend
You can make use of the cudnn benchmark instead of the vanilla benchmark. CuDNN can provided a lot of optimisation which can bring down your space usage, especially when the input to your neural network is of fixed size. Add the following lines on top of your code to enable CuDNN benchmark.
torch.backends.cudnn.benchmark = True
torch.backends.cudnn.enabled = TrueUsing 16-bit Floats
The new RTX and Volta cards by nVidia support both 16-bit training and inference.
model = model.half() # convert a model to 16-bit
input = input.half() # convert a model to 16-bitHowever, the 16-bit training options have to be taken with a pinch of salt.
While usage of 16-bit tensors can cut your GPU usage by almost half, there are a few issues with them.
- In PyTorch, batch-norm layers have convergence issues with half precision floats. If that's the case with you, make sure that batch norm layers are
float32.
model.half() # convert to half precision
for layer in model.modules():
if isinstance(layer, nn.BatchNorm2d):
layer.float()Also, you need to make sure when the output is passed through different layers in the forward function, the input to the batch norm layer is converted from float16 to float32 and then the output needs to be converted back to float16
One can find a good discussion of 16-bit training in PyTorch here.
2. You can have overflow issues with 16-bit float. Once, I remember I had such an overflow while trying to store the Union area of two bounding boxes (for computation of IoUs) in a float16. So make sure you have a realistic bound on the value you are trying to save in a float16.
Nvidia has recently released a PyTorch extension called Apex, that facilitates numerically safe mixed precision training in PyTorch. I have provided the link to that at the end of the article.
Conclusion
That concludes are discussion on memory management and use of Multiple GPUs in PyTorch. Following are the important links that you may wanna follow up this article with.