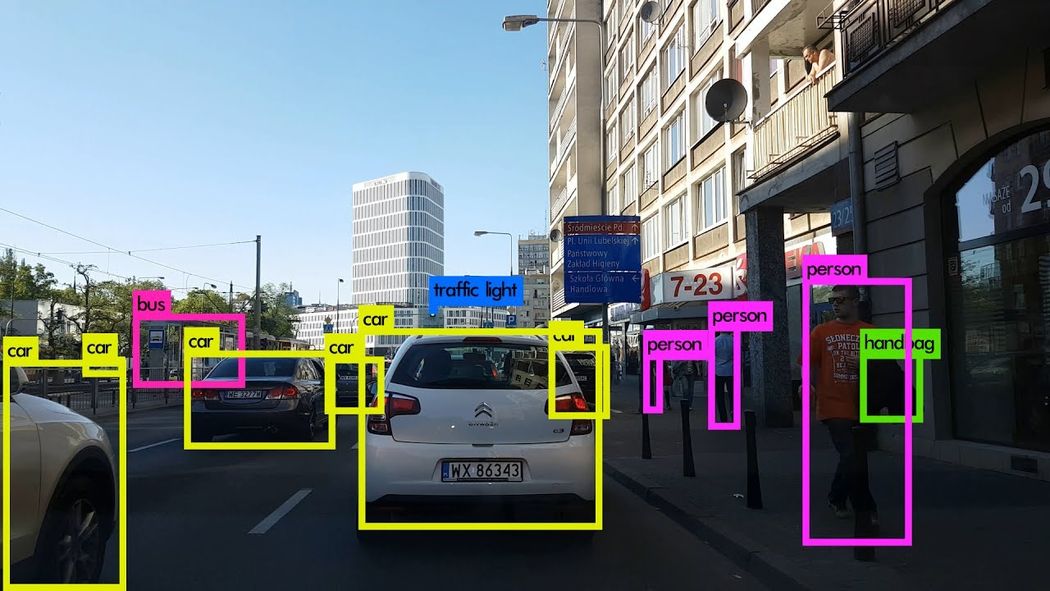
Image Credits: Karol Majek. Check out his YOLO v3 real time detection video here
This is Part 3 of the tutorial on implementing a YOLO v3 detector from scratch. In the last part, we implemented the layers used in YOLO's architecture, and in this part, we are going to implement the network architecture of YOLO in PyTorch, so that we can produce an output given an image.
Our objective will be to design the forward pass of the network.
The code for this tutorial is designed to run on Python 3.5, and PyTorch 0.4. It can be found in it's entirety at this Github repo.
This tutorial is broken into 5 parts:
-
Part 3 (This one): Implementing the the forward pass of the network
-
Part 4 : Objectness Confidence Thresholding and Non-maximum Suppression
Prerequisites
- Part 1 and Part 2 of the tutorial.
- Basic working knowledge of PyTorch, including how to create custom architectures with
nn.Module,nn.Sequentialandtorch.nn.parameterclasses. - Working with images in PyTorch
Defining The Network
As I've pointed out earlier, we use nn.Module class to build custom architectures in PyTorch. Let us define a network for our detector. In the darknet.py file, we add the following class.
class Darknet(nn.Module):
def __init__(self, cfgfile):
super(Darknet, self).__init__()
self.blocks = parse_cfg(cfgfile)
self.net_info, self.module_list = create_modules(self.blocks)
Here, we have subclassed the nn.Module class and named our class Darknet. We initialize the network with members, blocks, net_info and module_list.
Implementing the forward pass of the network
The forward pass of the network is implemented by overriding the forward method of the nn.Module class.
forward serves two purposes. First, to calculate the output, and second, to transform the output detection feature maps in a way that it can be processed easier (such as transforming them such that detection maps across multiple scales can be concatenated, which otherwise isn't possible as they are of different dimensions).
def forward(self, x, CUDA):
modules = self.blocks[1:]
outputs = {} #We cache the outputs for the route layer
forward takes three arguments, self, the input x and CUDA, which if true, would use GPU to accelerate the forward pass.
Here, we iterate over self.blocks[1:] instead of self.blocks since the first element of self.blocks is a net block which isn't a part of the forward pass.
Since route and shortcut layers need output maps from previous layers, we cache the output feature maps of every layer in a dict outputs. The keys are the the indices of the layers, and the values are the feature maps
As was the case with create_modules function, we now iterate over module_list which contains the modules of the network. The thing to notice here is that the modules have been appended in the same order as they are present in the configuration file. This means, we can simply run our input through each module to get our output.
write = 0 #This is explained a bit later
for i, module in enumerate(modules):
module_type = (module["type"])
Convolutional and Upsample Layers
If the module is a convolutional or upsample module, this is how the forward pass should work.
if module_type == "convolutional" or module_type == "upsample":
x = self.module_list[i](x)
Route Layer / Shortcut Layer
If you look the code for route layer, we have to account for two cases (as described in part 2). For the case in which we have to concatenate two feature maps we use the torch.cat function with the second argument as 1. This is because we want to concatenate the feature maps along the depth. (In PyTorch, input and output of a convolutional layer has the format `B X C X H X W. The depth corresponding the the channel dimension).
elif module_type == "route":
layers = module["layers"]
layers = [int(a) for a in layers]
if (layers[0]) > 0:
layers[0] = layers[0] - i
if len(layers) == 1:
x = outputs[i + (layers[0])]
else:
if (layers[1]) > 0:
layers[1] = layers[1] - i
map1 = outputs[i + layers[0]]
map2 = outputs[i + layers[1]]
x = torch.cat((map1, map2), 1)
elif module_type == "shortcut":
from_ = int(module["from"])
x = outputs[i-1] + outputs[i+from_]
YOLO (Detection Layer)
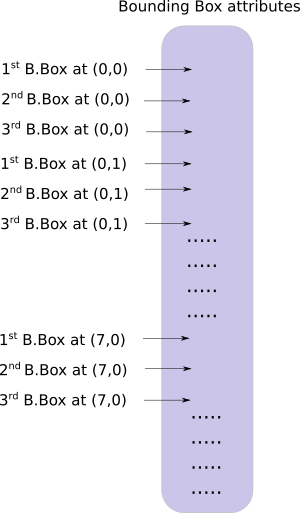
The output of YOLO is a convolutional feature map that contains the bounding box attributes along the depth of the feature map. The attributes bounding boxes predicted by a cell are stacked one by one along each other. So, if you have to access the second bounding of cell at (5,6), then you will have to index it by map[5,6, (5+C): 2*(5+C)]. This form is very inconvenient for output processing such as thresholding by a object confidence, adding grid offsets to centers, applying anchors etc.
Another problem is that since detections happen at three scales, the dimensions of the prediction maps will be different. Although the dimensions of the three feature maps are different, the output processing operations to be done on them are similar. It would be nice to have to do these operations on a single tensor, rather than three separate tensors.
To remedy these problems, we introduce the function predict_transform
Transforming the output
The function predict_transform lives in the file util.py and we will import the function when we use it in forward of Darknet class.
Add the imports to the top of util.py
from __future__ import division
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.autograd import Variable
import numpy as np
import cv2
predict_transform takes in 5 parameters; prediction (our output), inp_dim (input image dimension), anchors, num_classes, and an optional CUDA flag
def predict_transform(prediction, inp_dim, anchors, num_classes, CUDA = True):
predict_transform function takes an detection feature map and turns it into a 2-D tensor, where each row of the tensor corresponds to attributes of a bounding box, in the following order.
Here's the code to do the above transformation.
batch_size = prediction.size(0)
stride = inp_dim // prediction.size(2)
grid_size = inp_dim // stride
bbox_attrs = 5 + num_classes
num_anchors = len(anchors)
prediction = prediction.view(batch_size, bbox_attrs*num_anchors, grid_size*grid_size)
prediction = prediction.transpose(1,2).contiguous()
prediction = prediction.view(batch_size, grid_size*grid_size*num_anchors, bbox_attrs)
The dimensions of the anchors are in accordance to the height and width attributes of the net block. These attributes describe the dimensions of the input image, which is larger (by a factor of stride) than the detection map. Therefore, we must divide the anchors by the stride of the detection feature map.
anchors = [(a[0]/stride, a[1]/stride) for a in anchors]
Now, we need to transform our output according to the equations we discussed in Part 1.
Sigmoid the x,y coordinates and the objectness score.
#Sigmoid the centre_X, centre_Y. and object confidencce
prediction[:,:,0] = torch.sigmoid(prediction[:,:,0])
prediction[:,:,1] = torch.sigmoid(prediction[:,:,1])
prediction[:,:,4] = torch.sigmoid(prediction[:,:,4])
Add the grid offsets to the center cordinates prediction.
#Add the center offsets
grid = np.arange(grid_size)
a,b = np.meshgrid(grid, grid)
x_offset = torch.FloatTensor(a).view(-1,1)
y_offset = torch.FloatTensor(b).view(-1,1)
if CUDA:
x_offset = x_offset.cuda()
y_offset = y_offset.cuda()
x_y_offset = torch.cat((x_offset, y_offset), 1).repeat(1,num_anchors).view(-1,2).unsqueeze(0)
prediction[:,:,:2] += x_y_offset
Apply the anchors to the dimensions of the bounding box.
#log space transform height and the width
anchors = torch.FloatTensor(anchors)
if CUDA:
anchors = anchors.cuda()
anchors = anchors.repeat(grid_size*grid_size, 1).unsqueeze(0)
prediction[:,:,2:4] = torch.exp(prediction[:,:,2:4])*anchors
Apply sigmoid activation to the the class scores
prediction[:,:,5: 5 + num_classes] = torch.sigmoid((prediction[:,:, 5 : 5 + num_classes]))
The last thing we want to do here, is to resize the detections map to the size of the input image. The bounding box attributes here are sized according to the feature map (say, 13 x 13). If the input image was 416 x 416, we multiply the attributes by 32, or the stride variable.
prediction[:,:,:4] *= stride
That concludes the loop body.
Return the predictions at the end of the function.
return prediction
Detection Layer Revisited
Now that we have transformed our output tensors, we can now concatenate the detection maps at three different scales into one big tensor. Notice this was not possible prior to our transformation, as one cannot concatenate feature maps having different spatial dimensions. But since now, our output tensor acts merely as a table with bounding boxes as it's rows, concatenation is very much possible.
An obstacle in our way is that we cannot initialize an empty tensor, and then concatenate a non-empty (of different shape) tensor to it. So, we delay the initialization of the collector (tensor that holds the detections) until we get our first detection map, and then concatenate to maps to it when we get subsequent detections.
Notice the write = 0 line just before the loop in the function forward. The write flag is used to indicate whether we have encountered the first detection or not. If write is 0, it means the collector hasn't been initialized. If it is 1, it means that the collector has been initialized and we can just concatenate our detection maps to it.
Now, that we have armed ourselves with the predict_transform function, we write the code for handling detection feature maps in the forward function.
At the top of your darknet.py file, add the following import.
from util import *
Then, in the forward function.
elif module_type == 'yolo':
anchors = self.module_list[i][0].anchors
#Get the input dimensions
inp_dim = int (self.net_info["height"])
#Get the number of classes
num_classes = int (module["classes"])
#Transform
x = x.data
x = predict_transform(x, inp_dim, anchors, num_classes, CUDA)
if not write: #if no collector has been intialised.
detections = x
write = 1
else:
detections = torch.cat((detections, x), 1)
outputs[i] = x
Now, simply return the detections.
return detections
Testing the forward pass
Here's a function that creates a dummy input. We will pass this input to our network. Before we write this function, save this image into your working directory . If you're on linux, then type.
wget https://github.com/ayooshkathuria/pytorch-yolo-v3/raw/master/dog-cycle-car.png
Now, define the function at the top of your darknet.py file as follows:
def get_test_input():
img = cv2.imread("dog-cycle-car.png")
img = cv2.resize(img, (416,416)) #Resize to the input dimension
img_ = img[:,:,::-1].transpose((2,0,1)) # BGR -> RGB | H X W C -> C X H X W
img_ = img_[np.newaxis,:,:,:]/255.0 #Add a channel at 0 (for batch) | Normalise
img_ = torch.from_numpy(img_).float() #Convert to float
img_ = Variable(img_) # Convert to Variable
return img_
Then, we type the following code:
model = Darknet("cfg/yolov3.cfg")
inp = get_test_input()
pred = model(inp, torch.cuda.is_available())
print (pred)
You will see an output like.
( 0 ,.,.) =
16.0962 17.0541 91.5104 ... 0.4336 0.4692 0.5279
15.1363 15.2568 166.0840 ... 0.5561 0.5414 0.5318
14.4763 18.5405 409.4371 ... 0.5908 0.5353 0.4979
⋱ ...
411.2625 412.0660 9.0127 ... 0.5054 0.4662 0.5043
412.1762 412.4936 16.0449 ... 0.4815 0.4979 0.4582
412.1629 411.4338 34.9027 ... 0.4306 0.5462 0.4138
[torch.FloatTensor of size 1x10647x85]
The shape of this tensor is 1 x 10647 x 85. The first dimension is the batch size which is simply 1 because we have used a single image. For each image in a batch, we have a 10647 x 85 table. The row of each of this table represents a bounding box. (4 bbox attributes, 1 objectness score, and 80 class scores)
At this point, our network has random weights, and will not produce the correct output. We need to load a weight file in our network. We'll be making use of the official weight file for this purpose.
Downloading the Pre-trained Weights
Download the weights file into your detector directory. Grab the weights file from here. Or if you're on linux,
wget https://pjreddie.com/media/files/yolov3.weights
Understanding the Weights File
The official weights file is binary file that contains weights stored in a serial fashion.
Extreme care must be taken to read the weights. The weights are just stored as floats, with nothing to guide us as to which layer do they belong to. If you screw up, there's nothing stopping you to, say, load the weights of a batch norm layer into those of a convolutional layer. Since, you're reading only floats, there's no way to discriminate between which weight belongs to which layer. Hence, we must understand how the weights are stored.
First, the weights belong to only two types of layers, either a batch norm layer or a convolutional layer.
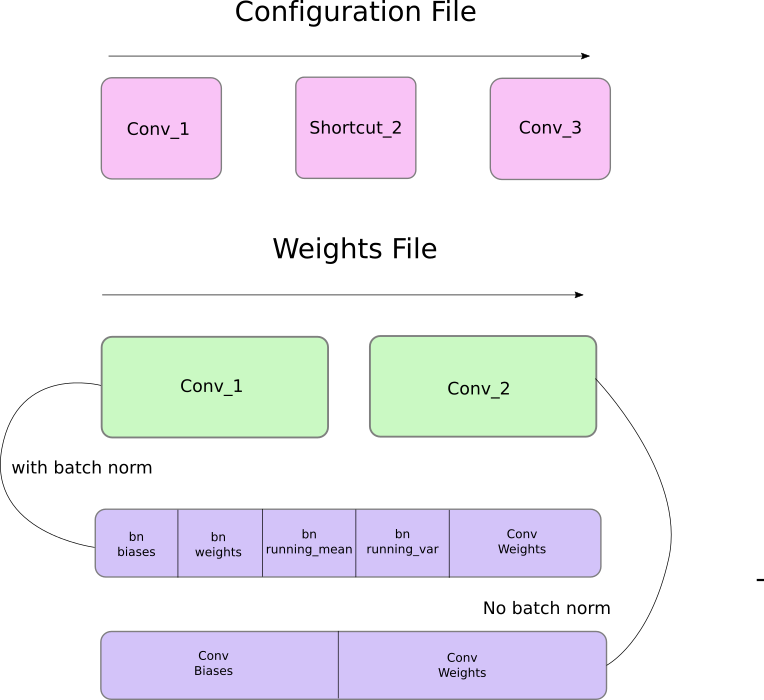
The weights for these layers are stored exactly in the same order as they appear in the configuration file. So, if a convolutional is followed by a shortcut block, and then the shortcut block by another convolutional block, You will expect file to contain the weights of the previous convolutional block, followed by those of the latter.
When the batch norm layer appears in a convolutional block, there are no biases. However, when there's no batch norm layer, bias "weights" have to read from the file.
The following diagram sums up how the weight stores the weights.
Loading Weights
Let us write a function load weights. It will be a member function of the Darknet class. It'll take one argument other than self, the path of the weightsfile.
def load_weights(self, weightfile):
The first 160 bytes of the weights file store 5 int32 values which constitute the header of the file.
#Open the weights file
fp = open(weightfile, "rb")
#The first 5 values are header information
# 1. Major version number
# 2. Minor Version Number
# 3. Subversion number
# 4,5. Images seen by the network (during training)
header = np.fromfile(fp, dtype = np.int32, count = 5)
self.header = torch.from_numpy(header)
self.seen = self.header[3]
The rest of bits now represent the weights, in the order described above. The weights are stored as float32 or 32-bit floats. Let's load rest of the weights in a np.ndarray.
weights = np.fromfile(fp, dtype = np.float32)
Now, we iterate over the weights file, and load the weights into the modules of our network.
ptr = 0
for i in range(len(self.module_list)):
module_type = self.blocks[i + 1]["type"]
#If module_type is convolutional load weights
#Otherwise ignore.
Into the loop, we first check whether the convolutional block has batch_normalise True or not. Based on that, we load the weights.
if module_type == "convolutional":
model = self.module_list[i]
try:
batch_normalize = int(self.blocks[i+1]["batch_normalize"])
except:
batch_normalize = 0
conv = model[0]
We keep a variable called ptr to keep track of where we are in the weights array. Now, if batch_normalize is True, we load the weights as follows.
if (batch_normalize):
bn = model[1]
#Get the number of weights of Batch Norm Layer
num_bn_biases = bn.bias.numel()
#Load the weights
bn_biases = torch.from_numpy(weights[ptr:ptr + num_bn_biases])
ptr += num_bn_biases
bn_weights = torch.from_numpy(weights[ptr: ptr + num_bn_biases])
ptr += num_bn_biases
bn_running_mean = torch.from_numpy(weights[ptr: ptr + num_bn_biases])
ptr += num_bn_biases
bn_running_var = torch.from_numpy(weights[ptr: ptr + num_bn_biases])
ptr += num_bn_biases
#Cast the loaded weights into dims of model weights.
bn_biases = bn_biases.view_as(bn.bias.data)
bn_weights = bn_weights.view_as(bn.weight.data)
bn_running_mean = bn_running_mean.view_as(bn.running_mean)
bn_running_var = bn_running_var.view_as(bn.running_var)
#Copy the data to model
bn.bias.data.copy_(bn_biases)
bn.weight.data.copy_(bn_weights)
bn.running_mean.copy_(bn_running_mean)
bn.running_var.copy_(bn_running_var)
If batch_norm is not true, simply load the biases of the convolutional layer.
else:
#Number of biases
num_biases = conv.bias.numel()
#Load the weights
conv_biases = torch.from_numpy(weights[ptr: ptr + num_biases])
ptr = ptr + num_biases
#reshape the loaded weights according to the dims of the model weights
conv_biases = conv_biases.view_as(conv.bias.data)
#Finally copy the data
conv.bias.data.copy_(conv_biases)
Finally, we load the convolutional layer's weights at last.
#Let us load the weights for the Convolutional layers
num_weights = conv.weight.numel()
#Do the same as above for weights
conv_weights = torch.from_numpy(weights[ptr:ptr+num_weights])
ptr = ptr + num_weights
conv_weights = conv_weights.view_as(conv.weight.data)
conv.weight.data.copy_(conv_weights)
We're done with this function and you can now load weights in your Darknet object by calling the load_weights function on the darknet object.
model = Darknet("cfg/yolov3.cfg")
model.load_weights("yolov3.weights")
That is all for this part, With our model built, and weights loaded, we can finally start detecting objects. In the next part, we will cover the use of objectness confidence thresholding and Non-maximum suppression to produce our final set of detections.
Further Reading
Ayoosh Kathuria is currently an intern at the Defense Research and Development Organization, India, where he is working on improving object detection in grainy videos. When he's not working, he's either sleeping or playing pink floyd on his guitar. You can connect with him on LinkedIn or look at more of what he does at GitHub









{kind=link}