Featured
public
Series: Data Augmentation
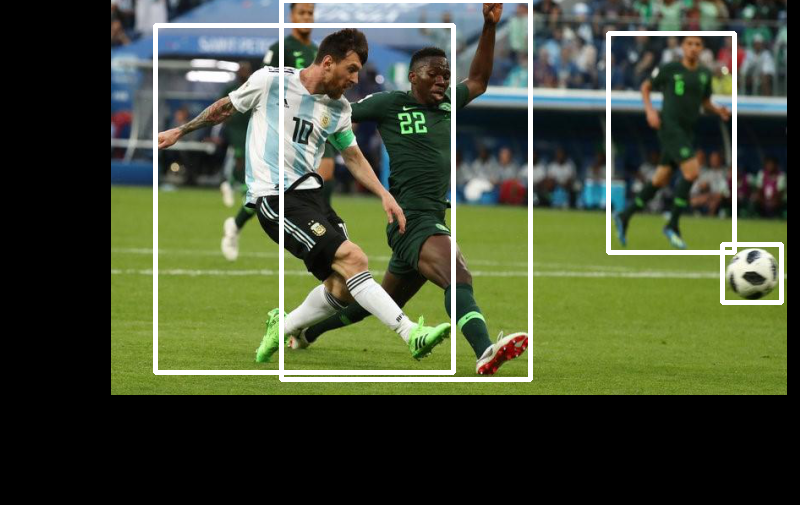
Data Augmentation for Bounding Boxes: Rethinking Image Transforms for Object Detection
How to adapt major image augmentation techniques for object detection purposes. We also cover the implementation of horizontal flip augmentation.
8 years ago